Elektor Arduino-ს მართვადი ხატვის რობოტი
პროდუქტის სპეციფიკაციები
- Arduino-ს მიერ კონტროლირებადი ხატვის რობოტი
- კომპონენტები:
- Arduino Nano – 5
- ნანო ფარი – 1
- Bluetooth მოდული – 1
- სერვოები – 3
- კაბელები – 4
- ხრახნები:
- M2X8 – 6
- M2.5×6 – 2
- M3x6 – 2
- M3x8 – 15
- M3x10 – 3
- M3x12 – 6
- M3x16 – 2
- თხილი:
- M2 – 6
- M3 – 29
- შუასადებები:
- M3 – 2
- შუალედები:
- შავი ნეილონი M3x2 – 5
- M3x9 – 2
- დამატებითი კომპონენტები:
- ზამბარები 5×0.4×6 – 1
- საკისრები M3x8 – 2
პროდუქტის გამოყენების ინსტრუქცია
ნაბიჯი 1: ნანო გაფართოების ფარის დაყენება
პირველ რიგში, ნაჩვენებ ადგილას დაამონტაჟეთ ნანო გაფართოების ფარი 8x M3X8 ხრახნით და 4x M3X2 შუასადებით.
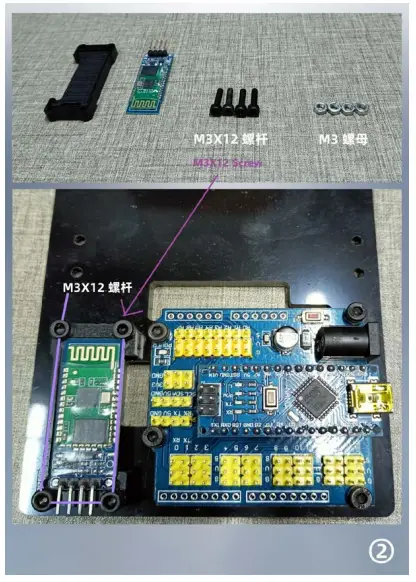
ნაბიჯი 2: Bluetooth მოდულის ინსტალაცია
შემდეგ დააინსტალირეთ Bluetooth მოდული 4x M3X12 ხრახნითა და თხილით.
კომპონენტები
ხრახნები
- M2X8 —6
- M2.5×6 —2
- M3x6 —2
- M3x8—15
- M3x10—3
- M3x12—6
- M3x16—2
თხილი
- M2 —6
- M3 —29
შუასადებები
- M3 —2
შავი ნეილონის შუასადებები
- M3x2 —5
- M3x9 —2
წყაროები
- 5×0.4×6 —1
საკისრები
- M3x8 —2
- Arduino Nano —5
- ნანოფარი —1
- Bluetooth მოდული —1
- სერვოები —3
- კაბელები —4
ინსტალაციის ინსტრუქცია
ნაბიჯი 1
- პირველ რიგში, დაამონტაჟეთ ნანო გაფართოების ფარი 8x M3X8 ხრახნით და 4x M3X2 შუასადებით ნაჩვენებ ადგილას.

ნაბიჯი 2
- შემდეგ დააინსტალირეთ Bluetooth მოდული 4x M3X12 ხრახნითა და თხილით
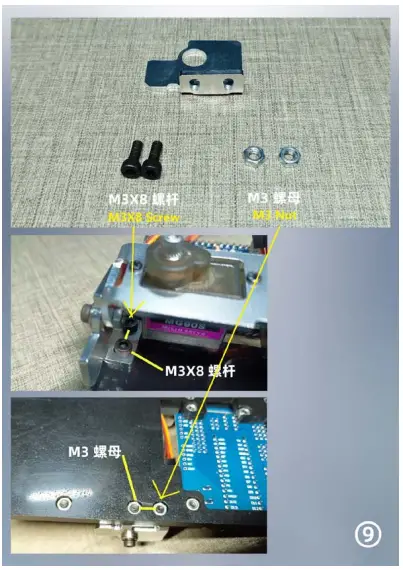
ნაბიჯი 3
- შემდეგ დაამონტაჟეთ სამაგრი 2x M3X8 ხრახნითა და თხილით

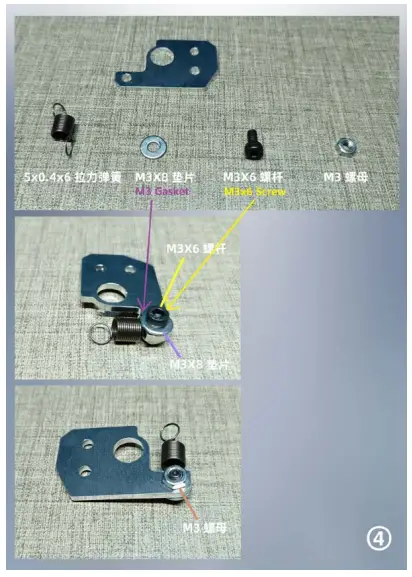
ნაბიჯი 4
- ააწყვეთ ეს მკლავი დამაბრუნებელი ზამბარით
ნაბიჯი 5
- ყველა ერთად მოათავსეთ სამაგრში

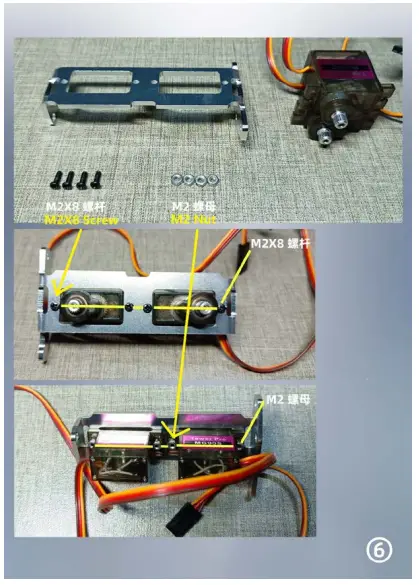
ნაბიჯი 6
- ახლა 2 სერვოს აწყობა M2X8 ხრახნებითა და თხილით
ნაბიჯი 7
- კონსტრუქციაზე საკისრების დამატება
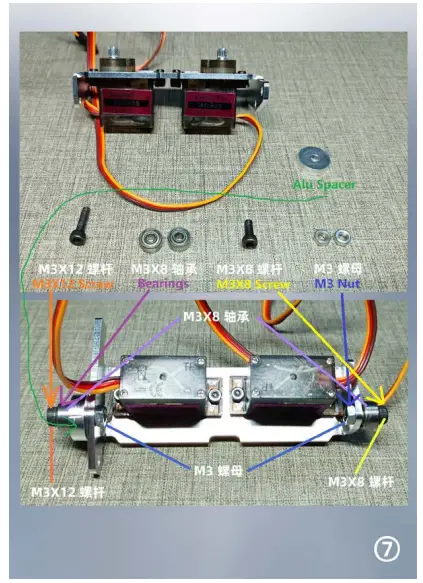
ნაბიჯი 8
- სერვოძრავებით ჩარჩო დამაბრუნებელ ზამბარასთან შეაერთეთ
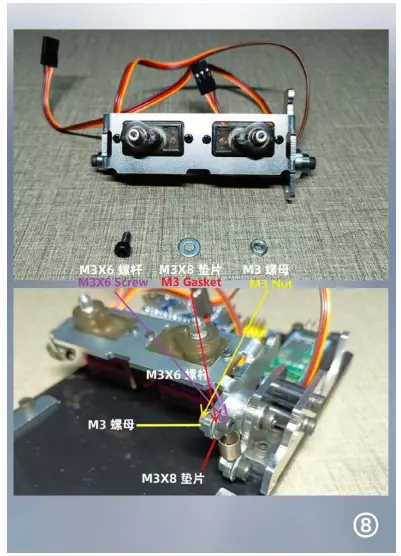
ნაბიჯი 9
- დაამონტაჟეთ მეორე საბაზისო სამაგრი და შეაერთეთ ის სერვოძრავის ჩარჩოსთან
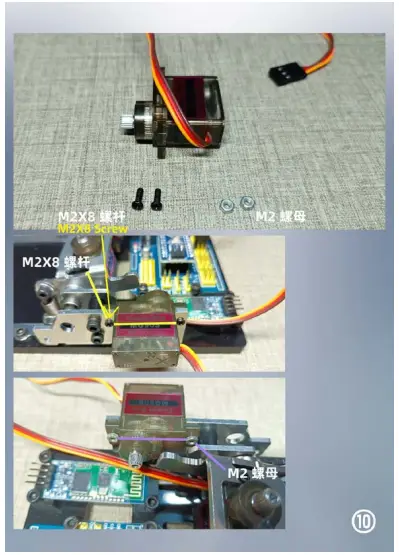
ნაბიჯი 10
- დააინსტალირეთ ბოლო სერვოძრავა
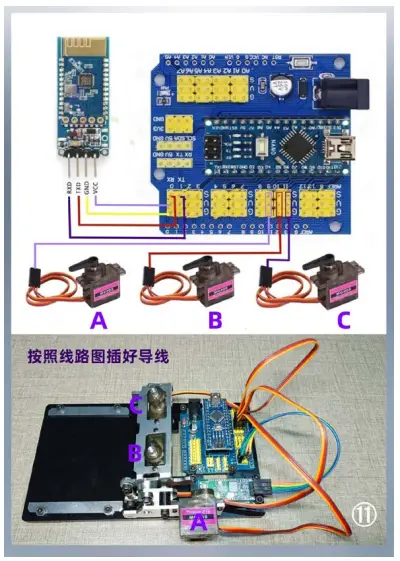
ნაბიჯი 11
- ნანო გაფართოების ფარზე 3 სერვოძრავის შეერთება სურათზე ნაჩვენები მეთოდით
ნაბიჯი 12
- ჩართეთ და დაელოდეთ სანამ სერვომოტორები შეწყვეტენ ბრუნვას, შემდეგ გამორთეთ დენი
- დაამონტაჟეთ სერვომკლავები ჰორიზონტალურად, როგორც ეს სურათებზეა ნაჩვენები.

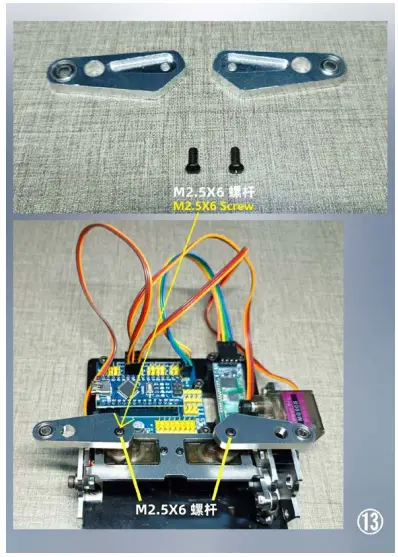
ნაბიჯი 13
- დაამონტაჟეთ 2 რობოტის მკლავი M2.5X6 ხრახნებით
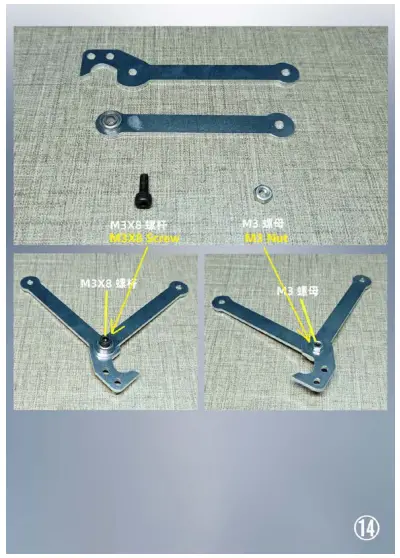
ნაბიჯი 14
- და M3 ხრახნები
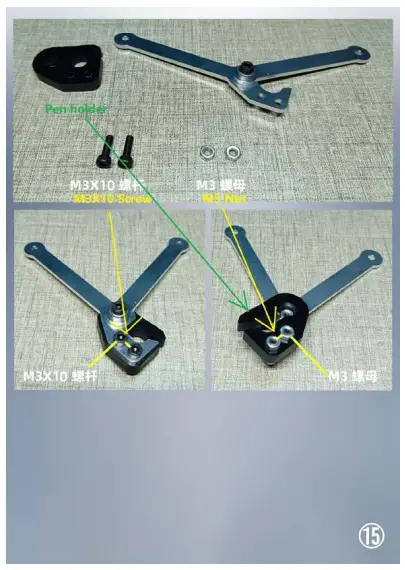
ნაბიჯი 15
- დააინსტალირეთ კალმის დამჭერი
ნაბიჯი 16
- ყველაფერი ერთად შეაერთეთ და აწყობა დაასრულეთ

ხშირად დასმული კითხვები
კითხვა: როგორ ჩავრთო ხატვის რობოტი?
A: ჩართეთ რობოტი და დაელოდეთ სანამ სერვომოტორები შეწყვეტენ ბრუნვას, შემდეგ გამორთეთ დენი.
კითხვა: როგორ შევაერთო სერვოები ნანო გაფართოების ფართან?
A: შეაერთეთ 3 სერვოძრავა ნანო გაფართოების ფარზე, როგორც ეს ნაჩვენებია სახელმძღვანელოში მოცემულ სურათზე.
დოკუმენტები / რესურსები
 |
Elektor Arduino-ს მართვადი ხატვის რობოტი [pdf] ინსტალაციის სახელმძღვანელო Arduino-ს კონტროლირებადი ხატვის რობოტი, კონტროლირებადი ხატვის რობოტი, ხატვის რობოტი, რობოტი |