HaoruTech RTLS1 პოზიციონირების მოდული

სპეციფიკაციები:
- პროდუქტის დასახელება: HR-RTLS1-PDOA
- მწარმოებელი: Haorutech co. შ.პ.ს
პროდუქტის ინფორმაცია:
HR-RTLS1-PDOA არის მაღალი სიზუსტის რეალურ დროში პოზიციონირების სისტემა, რომელიც შემუშავებულია HR Technology-ის მიერ. იგი მხარს უჭერს პოზიციონირების ორ რეჟიმს: ფრენის დროის (TOF) და ჩამოსვლის ფაზის სხვაობის (PDOA) კუთხის გაზომვას. სისტემა შეიძლება გამოყენებულ იქნას შემდეგ რეჟიმში ან ერთი წამყვანის პოზიციონირების რეჟიმში, რაც მას მრავალმხრივს ხდის სხვადასხვა მდებარეობის აპლიკაციის სცენარისთვის.
სისტემის მახასიათებლები:
- მაღალი სიზუსტის პოზიციონირება
- მხარს უჭერს TOF და PDOA კუთხის გაზომვას
- მრავალმხრივი განაცხადის სხვადასხვა სცენარისთვის
პროდუქტის უპირატესობა:
| ნივთების შედარება | HR-RTLS1-PDOA | სხვა პროდუქტები |
|---|---|---|
| ძირითადი ჩიპი | უახლეს DW3220-ზე დაყრდნობით | ტრადიციული ერთი ჩიპური გადაწყვეტის საფუძველზე, პირველი inDW1000 |
პროდუქტის გამოყენების ინსტრუქცია
სისტემის განლაგება:
აღჭურვილობის მომზადება:
დარწმუნდით, რომ ყველა კომპონენტი იმყოფება და მუშა მდგომარეობაშია.
PDOA წამყვანის ინსტალაცია:
უსაფრთხოდ დაამაგრეთ PDOA წამყვანები სასურველ ადგილებში.
Tag ინსტალაცია:
მიამაგრეთ tags ობიექტებზე ან პირებზე, რომლებიც საჭიროებენ თვალყურის დევნებას.
დრაივერის ინსტალაცია:
დააინსტალირეთ საჭირო დრაივერები სისტემაში სათანადო ფუნქციონირებისთვის.
დაკავშირება კომპიუტერის პროგრამულ უზრუნველყოფასთან:
დაამყარეთ კავშირი კომპიუტერის პროგრამასთან მონაცემთა დამუშავებისთვის.
წამყვანის კალიბრაცია:
ბორტზე OLED ეკრანი:
დააკალიბრეთ წამყვანები საბორტო OLED დისპლეის გამოყენებით ზუსტი პოზიციონირებისთვის.
შესავალი
HR-RTLS1-PDOA არის მაღალი სიზუსტის რეალურ დროში პოზიციონირების სისტემა (დაფუძნებულია Decawave-ის DW3000 სერიის ჩიპებზე) შემუშავებული HR Technology-ის მიერ.
HR-RTLS1-PDOA მხარს უჭერს პოზიციონირების ორ რეჟიმს: TOF და PDOA კუთხის გაზომვას. ის შეიძლება გამოყენებულ იქნას როგორც შემდეგი სისტემა ან ერთი წამყვანის პოზიციონირების რეჟიმი. მოდულის სხვადასხვა კომბინაციით, მას შეუძლია მოერგოს მდებარეობის განაცხადის სცენარებს.
სისტემის მახასიათებლები
პოპულარული MCU-STM32, მეგობრული დამწყებთათვის:
HR-RTLS1-ის ULM3/ULM150/LD1 მოდული იღებს STM32F103CBT6 სერიებს (ან სრულად თავსებად ალტერნატიულ ჩიპს, დამზადებულია ჩინეთში), როგორც მთავარი კონტროლის MCU.
ტარებადი მოწყობილობები იღებენ STM32L151CBU6 დაბალი სიმძლავრის მიკროკონტროლერს, რომელიც დაყენებულია CUBEmx ინსტრუმენტის მიერ, შემუშავებული HAL ბიბლიოთეკის და KEIL-MDK ინტეგრირებული განვითარების გარემოს მიერ.
მარტივი გაფართოებული ინტერფეისი:
მოდულები უზრუნველყოფენ გარე გაფართოების მონაცემთა ინტერფეისებს, რომლებიც ადვილად შეიძლება დაუკავშირდეს კომპიუტერს, მობილურ ტელეფონს, სხვა მიკროკონტროლერს, Raspberry PI-ს, Arduino-ს, PLC-ს და სხვა მოწყობილობებს გაფართოებისა და განვითარებისთვის.
მაღალი პოზიციონირების სიზუსტე:
სისტემა იღებს Decawave მაღალი სიზუსტის პოზიციონირების IC-ს, როგორც ძირითადი პოზიციონირების მოდულს. ის მუშაობს თვითგანვითარებული პოზიციონირების ალგორითმით და ფილტრაციის ალგორითმით, რაც პოზიციონირებას ახდენს tag ადაპტირება სხვადასხვა რთულ საველე პირობებთან. პოზიციონირების სიზუსტე არის 10 სმ (CEP95);
მრავალჯერადი მხარდაჭერაtags და მრავალწამყვანი:
სისტემას შეუძლია ადვილად გააფართოოს წამყვანების რაოდენობა და tags კონფიგურაციით, რაც მოსახერხებელია მომხმარებლებისთვის სისტემის გაფართოებისთვის;
ჩამონტაჟებული Kalman ფილტრის ალგორითმი მოდულში
ჩაშენებული Kalman ფილტრის ალგორითმი შეიძლება ჩართოთ/გამორთოთ, რათა გამომავალი მონაცემები იყოს სტაბილური და გლუვი.
პროდუქტის უპირატესობა
ცხრილი 3-1 RTLS1-PDOA პროდუქტის უპირატესობა
| ნივთების შედარება | HaoruUWB | სხვა პროდუქტები |
| ძირითადი ჩიპი | უახლეს DW3220-ზე დაყრდნობით
ერთი ჩიპური გადაწყვეტა, პირველი ინდუსტრიაში. |
ტრადიციულზე დაყრდნობით
DW1000 ორმაგი ჩიპის გადაწყვეტა. |
| ბორტ კომპონენტები
წამყვანები. |
ნაკლები კომპონენტი, ადვილად ინტეგრირებული. | მეტი კომპონენტი, რთულია ინტეგრირება. |
| საერთო ღირებულება | ნაკლები | უმაღლესი |
|
ენერგიის მოხმარება |
ის იყენებს ენერგიის მხოლოდ 10%-ს
ტრადიციული ორმაგი DW1000 ჩიპის მოხმარება. |
მაღალი |
| თავსებადია თუ არა TWR multi-თან
წამყვანის განლაგება |
დიახ, PDOA წამყვანი ასევე შეიძლება გამოყენებულ იქნას როგორც სამმხრივი პოზიციონირება
წამყვანი |
არა, PDOA წამყვანს შეუძლია მხოლოდ საკუთარი ფუნქციის შესრულება. |
სერიის პროდუქტები
| 序号 | 型号 მოდელი | 主要特点 მთავარი მახასიათებლები |
| 1 | ULM3 | ოფიციალური DWM3000 მოდულები, ჩვენება, 40 მეტრი |
| 2 | ULM3-SH | სამაჯურის გარსი, ჩაშენებული ბატარეა, მოძრაობის ამოცნობა, 40
მეტრი |
| 3 | ULM3-PDOA | PDOA წამყვანები, კუთხის საზომი, ერთჯერადი წამყვანის განლაგება, შემდეგი მანქანა, 40 მეტრი. |
როგორც ქვემოთ მოცემულ სურათზე ჩანს, HR-RTLS1 სერიის მოდულები

სისტემის პარამეტრები
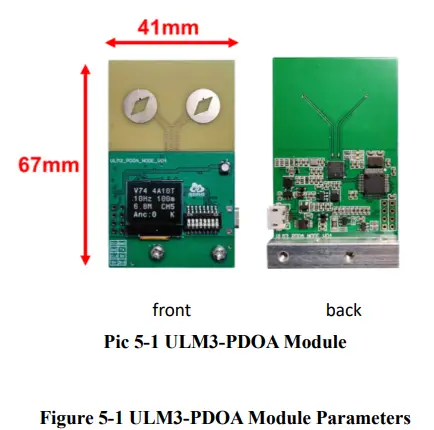
ULM3-PDOA პარამეტრები
| კატეგორია | პარამეტრი |
| ძალაუფლება | DC5V გარე კვების წყარო |
| გამოვლენის მაქსიმალური დიაპაზონი | 40 მ (ღია ზონა) @6.8 Mbps |
| MCU | STM32F103CBT6 (GD32F103CBT6) |
| ბორტზე ჩვენება | 0.6 დიუმიანი OLED |
| მოდულის ზომა | 41*67.5 მმ |
| დიაპაზონის სიზუსტე | ± 5 სმ |
| კუთხის ამოცნობა | 120°(ცენტრალიზებული მოდულით, -60°
~+60°) |
| კუთხის სიზუსტე | ±5 |
| სამუშაო ტემპერატურა | -20~70℃ |
| კომუნიკაციის რეჟიმი | USB სერიულ პორტში / TTL სერიალი |
| მონაცემთა განახლების სიხშირე | 100Hz (MAX, რეგულირებადი) |
| სიხშირის დომენი | 6250-8250 MHz (CH5/CH9) |
| გამტარუნარიანობა | 500 MHz |
| ანტენის ტიპი | PCB ორმაგი ანტენა |
| ემისიის სიმძლავრის სპექტრული სიმკვრივე
(პროგრამირებადი) |
-41dBm/MHz |
| კომუნიკაციის მაჩვენებელი | 6.8 Mbps |
ULM3 პარამეტრები

ცხრილი 5-2 ULM3 მოდულის პარამეტრები
| კატეგორია | პარამეტრი |
|
ძალაუფლება |
DC3.7V~5V გარე კვების წყარო
(Power Bank ან Li-ion ბატარეა) |
| გამოვლენის მაქსიმალური დიაპაზონი | 40 მ (ღია ზონა) @6.8 Mbps |
| MCU | STM32F103CBT6 (GD32F103CBT6) |
| ბორტზე ჩვენება | 0.6 დიუმიანი OLED |
| მოდულის ზომა | 27*70 მმ (ანტენის და ბაზის ჩათვლით) |
| დიაპაზონის სიზუსტე | ± 5 სმ |
| სამუშაო ტემპერატურა | -20~70℃ |
| კომუნიკაციის რეჟიმი | USB სერიულ პორტში / TTL სერიალი |
| მონაცემთა განახლების სიხშირე | 100Hz (MAX, რეგულირებადი) |
| სიხშირის დომენი | 6250-8250 MHz (CH5/CH9) |
| გამტარუნარიანობა | 500 MHz |
| ანტენის ტიპი | საბორტო კერამიკული ანტენა |
| ემისიის სიმძლავრის სპექტრული სიმკვრივე
(პროგრამირებადი) |
-41dBm/MHz |
| კომუნიკაციის მაჩვენებელი | 6.8 Mbps |
სისტემის აპლიკაცია
- ერთი წამყვანის მცირე დიაპაზონის განლაგება;
- ბარგის, ხელსაწყოს მანქანისა და სხვა შემდეგი სისტემების დაცვა;
- ზარალის საწინააღმდეგო tag, საჰაეროtagდა ა.შ.
- ერთი თითის საჩვენებელი კავშირის აპლიკაცია;
სისტემის განლაგება
აღჭურვილობის მომზადება
- ULM3-PDOA მოდული, ზოგიერთი ULM3 tags(ან ULM3-mini სამაჯური-tags), 1 microUSB კაბელი, 1 წამყვანის დამჭერი.
| სია
ნომერი |
კომპონენტის სახელი |
| 1 | 1 ULM3-PDOA მოდული |
| 2 | ULM3 tags(ან ULM3-mini სამაჯური-tags) რამდენიც
საჭირო |
| 3 | 1 Power Bank ემთხვევა ULM3 tag ელექტრომომარაგებისთვის. |
| 4 | 1 microUSB კაბელი |
| 5 | 1 ანკერის დამჭერი, 4 M3 ხრახნი, 2 სპილენძის სვეტი. |
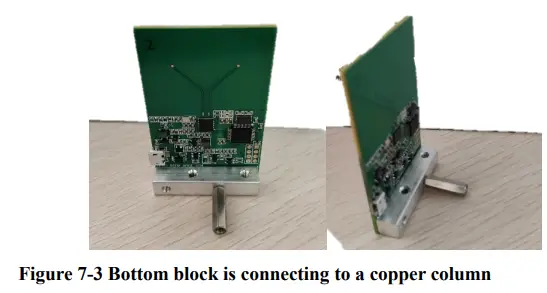
PDOA წამყვანის ინსტალაცია
ULM3-PDOA მოდულის ანტენა ორიენტირებულია პოზიციონირებაზე tag. მოდული იკვებება გარე 5 ვ ელექტრომომარაგებით. მოდულის ბოლოში არის დამაგრებული კვადრატული ბლოკი, რომელიც შეიძლება დამაგრდეს UGV-ზე ან სამუშაო მაგიდაზე M3 ხრახნებით. ასევე, ის შეიძლება დაკავშირებული იყოს სპილენძის სვეტთან, რათა გაიზარდოს დამხმარე ძალა ჰორიზონტალურ პლატფორმაზე.
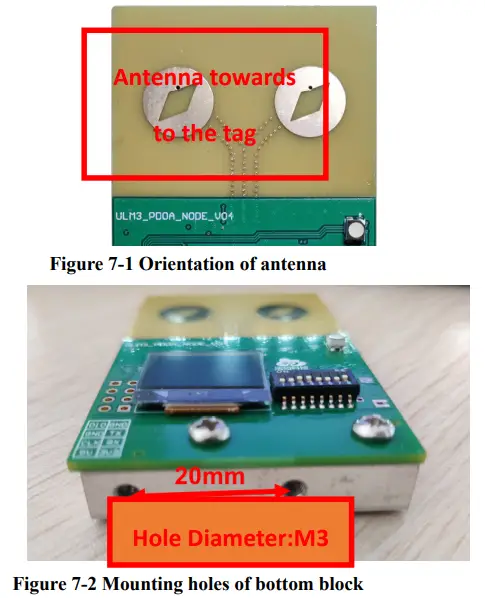
წამყვანი დაყენებული იყო კოორდინატთა წერტილად (0,0) კოორდინატთა სისტემის დასამყარებლად, ხოლო Y ღერძი პირდაპირ წამყვანის წინ იყო. The tag პოზიციონირება და AOA გაანგარიშება შეიძლება დასრულდეს -60°-დან +60°-მდე.

საკითხს ყურადღება სჭირდება:
- The tag უნდა იყოს განლაგებული წამყვანის სწორი დაფარვის დიაპაზონში, წინააღმდეგ შემთხვევაში შეიძლება მოხდეს გარკვეული შეცდომები, როგორიცაა არასწორი განლაგება;
- წამყვანის ანტენის ზედაპირი უნდა იყოს ორიენტირებული tag;
- მანძილი წამყვანსა და tag უნდა იყოს 1 მეტრზე მეტი;
- წამყვანი უნდა დამონტაჟდეს ღია ადგილას;
- შორის არ უნდა იყოს ოკლუზია tag და წამყვანი, განსაკუთრებით არ არის ფოლადის ფირფიტები და სხვა ლითონები.
Tag ინსტალაცია
ULM3-ის ბოლოში არის USB ინტერფეისი tag, რომელიც უნდა იყოს დაკავშირებული საქონელთან მიწოდებულ დამტენ ბანკთან ელექტრომომარაგებისთვის. ULM3-mini სამაჯური tag აქვს ჩაშენებული ბატარეა, დიდხანს აჭერთ SOS ღილაკს 3 წამის განმავლობაში მის გასააქტიურებლად.
დრაივერის ინსტალაცია
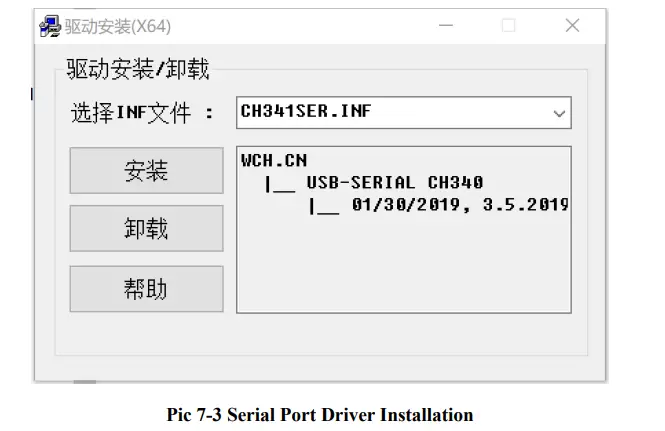
გადადით კატალოგში “HR-RTLS1-PDOA 开箱测试资料\串口驱动”-ზე ორჯერ დააწკაპუნეთ CH341SER.EXE მის დასაინსტალირებლად, გამოიყენეთ ნაგულისხმევი პარამეტრები, დააწკაპუნეთ “ინსტალაცია” ღილაკზე და მიჰყევით ინსტალაციის პროცესის მითითებებს.
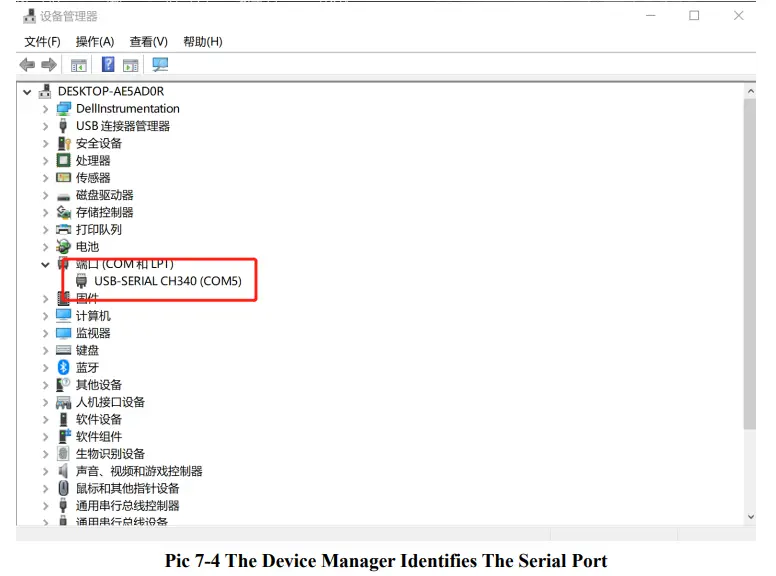
დრაივერის დაყენების შემდეგ შეაერთეთ წამყვანი/tag მოდული კომპიუტერზე. გახსენით მოწყობილობის მენეჯერი კომპიუტერზე და შეამოწმეთ, არის თუ არა სერიული პორტის დრაივერი სწორად დაინსტალირებული. თუ პორტი იდენტიფიცირებულია, ჩაწერეთ CH340 სერიული პორტის ნომერი. მაგampშემდეგ სურათზე ჩანს, რომ დრაივერი დაინსტალირებულია, მოწყობილობა იდენტიფიცირებულია და სერიული პორტის ნომერია COM5. თუ სერიული პორტი არ არის ნაჩვენები ან არის "!" ძახილის ნიშნის შეცდომა, გთხოვთ, დაუკავშირდეთ შესაბამის გაყიდვების ინჟინრებს.
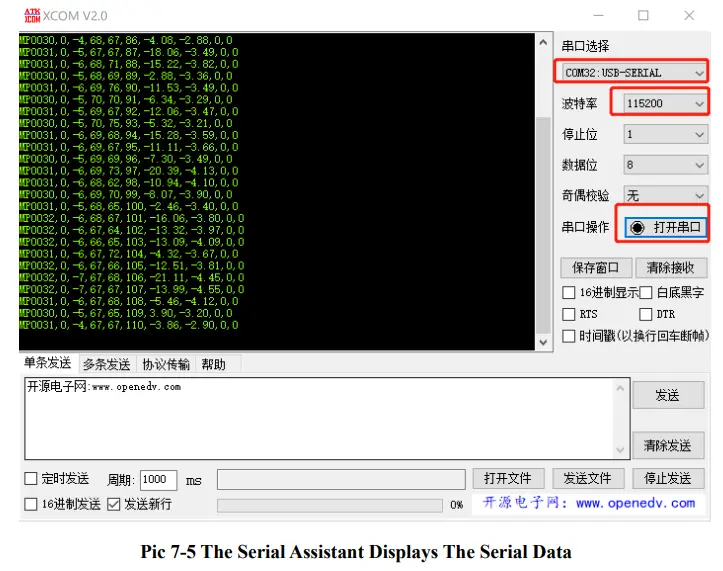
გადადით კატალოგზე „HR-RTLS1-PDOA 开箱测试资料\串口驱动“; დააწკაპუნეთ ორჯერ XCOM V2.0.exe სერიული პორტის გამართვის ასისტენტის გასაშვებად, აირჩიეთ სერიული პორტის ნომერი იდენტიფიცირებული. დააყენეთ ბაუდის სიხშირე 115200-ზე XNUMX-ზე.串口".
გაიქეცი tag მოდული, თუ შეტყობინების ყუთს შეუძლია MP-ით დაწყებული სიმებიანი მონაცემების მიღება, ეს ნიშნავს, რომ სერიული პორტის მონაცემთა კომუნიკაცია მუშაობს და წამყვანი წარმატებით არის დაკავშირებული კომპიუტერთან.
დაკავშირება კომპიუტერის პროგრამულ უზრუნველყოფასთან
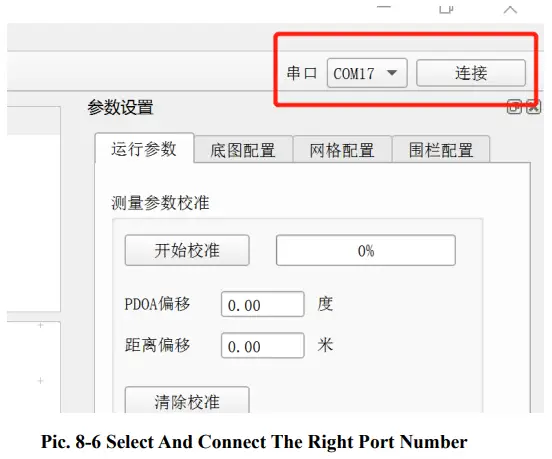
გახსენით "HR-RTLS1-PDOA 开箱测试资料\ 上位机软件" კატალოგი, გახსენით "HR_PDOA_RTLS.zip"; გაუშვით HR_PDOA_RTLS.exe,ახლა ჩვენ შეგვიძლია გავუშვათ კომპიუტერის პროგრამული უზრუნველყოფა. აირჩიეთ სწორი სერიული პორტის ნომერი პროგრამული უზრუნველყოფის ზედა მარჯვენა კუთხეში, დააწკაპუნეთ "დაკავშირება".
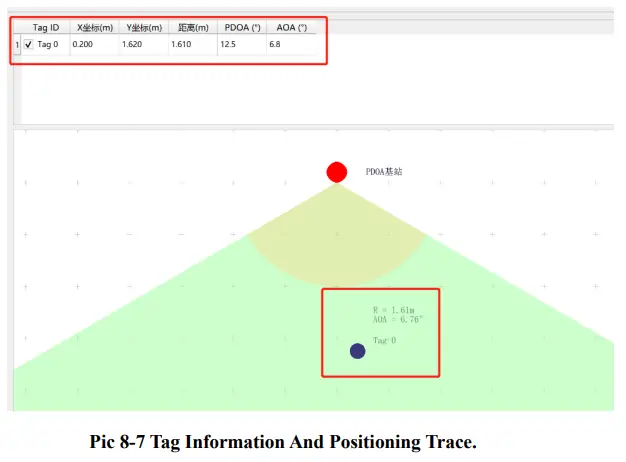
კომპიუტერთან დაკავშირების შემდეგ და ჩართეთ tag წარმატებით, კომპიუტერის პროგრამულ უზრუნველყოფას შეუძლია აჩვენოს tag ინფორმაცია და პოზიციონირების კვალი.
კომუნიკაციის პროტოკოლი
მონაცემთა გადაცემის პროტოკოლი
Uplink მონაცემთა პროტოკოლი არის UWB მოდულის მიერ სერიული პორტის მეშვეობით ატვირთული მონაცემები.
სერიული კომუნიკაციის ბაუდის სიხშირე: 115200bps-8-n-1
საკომუნიკაციო პროტოკოლი:
MPxxxx,tag_id,x_cm,y_cm,დისტანცია_სმ,დიაპაზონის ნომერი,pdoa_deg,aoa_deg,დისტანცია ce_offset_cm,pdoa_offset_deg\r\n
სერიული კომუნიკაციის მონაცემები მაგample: MP0036,0,302,109,287,23,134.2,23.4,23,56
ცხრილი 8-1 სერიული საკომუნიკაციო პროტოკოლის აღწერა
| შინაარსი | Example | აღწერა |
| MPxxxx | MP0036 | მონაცემთა პაკეტის თავი, 0036 არის ყველა მონაცემთა ბაიტის რაოდენობა MPxxxx-ის გარდა, \r\n დასასრულის ჩათვლით, რომელიც ფიქსირდება 4 სიმბოლოზე. თუ არის
სიგრძეზე ნაკლები, შეავსეთ 0-ით. |
| tag_ ID | 0 | მიმდინარე tag ID |
| x_cm | 302 | X კოორდინატები tag, მთელი რიცხვები,
ერთეული: სმ |
| y_cm | 109 | Y-ის კოორდინატები tag, მთელი რიცხვები,
ერთეული: სმ |
| მანძილი_სმ | 287 | პირდაპირი მანძილი წამყვანს შორის
და tag, მთელი რიცხვები, ერთეულები:სმ |
| დიაპაზონის ნომერი | 23 | დიაპაზონის სერიული ნომერი, 0-255 |
| pdoa_deg | 134.2 | PDOA მნიშვნელობა, Float, ერთეული: ხარისხი |
| aoa_deg | 23.4 | AOA მნიშვნელობა, Float, ერთეული: ხარისხი |
| მანძილი_ჩანაცვლება_სმ | 23 | პირდაპირი მანძილის კალიბრაციის მნიშვნელობა
წამყვანსა და tag, მთელი რიცხვები, ერთეულები:სმ |
| pdoa_offset_deg | 56 | PDOA მნიშვნელობის კალიბრაციის მნიშვნელობა,
ფლოტი, ერთეულები: ხარისხი |
| \r\n | დასრულებული მონაცემები |
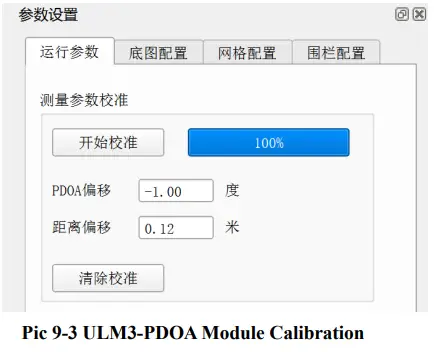
წამყვანის კალიბრაცია
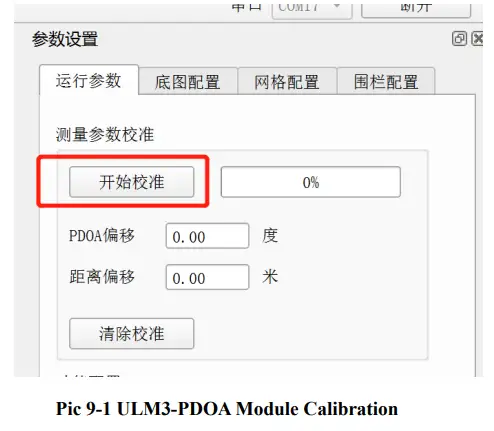
შედუღების, PCB წარმოების პროცესის და სხვა ფაქტორების გავლენის გამო, ULM3-PDOA მოდულის ორი ანტენის RF გადამცემი ხაზი გამოიწვევს მცირე შეცდომებს, რაც გამოიწვევს PDOA კუთხის გადახრას, რომელიც შეიძლება დაკალიბრდეს კომპიუტერის პროგრამული უზრუნველყოფით.
მას შემდეგ, რაც ULM3-PDOA მოდული წარმატებით იქნება დაკავშირებული კომპიუტერთან და tag ნაჩვენებია მდებარეობის მონაცემები, დააწკაპუნეთ ღილაკზე „დაკალიბრების დაწყება“, მოათავსეთ წამყვანი და tag იმავე სიმაღლეზე, როგორც მოთხოვნილი, მოათავსეთ tag წამყვანის ორი ანტენის ცენტრის წინ და გაზომეთ მანძილი წამყვანსა და tag. რეკომენდებულია მანძილი 2 მეტრზე მეტი იყოს.
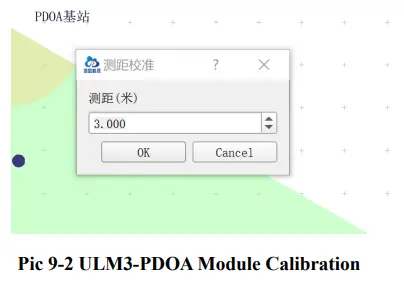
შეავსეთ გაზომილი მანძილის მნიშვნელობა კომპიუტერის პროგრამულ უზრუნველყოფაში და შეინახეთ მისი პოზიცია tag და მიამაგრეთ უცვლელი მანამ, სანამ კალიბრაციის პროგრესის ზოლი არ გადავა 100%-მდე, რაც ხდება კალიბრაციის დასრულებამდე.
კალიბრაციის დასრულების შემდეგ, კომპიუტერის პროგრამული უზრუნველყოფა ითხოვს კალიბრაციის გადახრას და წამყვანი გამოსცემს კალიბრაციის მონაცემებს ამ გადახრის მიხედვით. თუ საჭიროა კალიბრაციის მონაცემების გასუფთავება, შეგიძლიათ დააწკაპუნოთ ღილაკზე „გასუფთავება“ გადახრის მნიშვნელობის გადატვირთვისა და ხელახალი კალიბრაციისთვის.
ბორტზე OLED ეკრანი
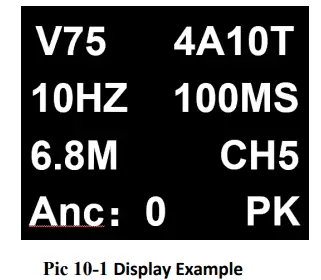
სურათი 10-1 ინფორმაციის ჩვენების აღწერა
| Example | აღწერა |
| V75 | Firmware ვერსია |
| 4A10T | მაქსიმუმ 4 წამყვანი და 10 tags |
| 10 ჰც | მონაცემთა განახლების სიჩქარე (მიმდინარე რეჟიმი) |
| 100 ms | მონაცემთა განახლების მიმდინარე პერიოდი (=1/ მონაცემები
განახლების სიჩქარე) |
| 6.8 მ | მიმდინარე UWB ჰაერის სიჩქარეა 6.8 Mbps (ალტერნატიული ვარიანტი: 110k) |
| CH5 | მიმდინარე UWB არხი არის CH5 (ალტერნატივა
ვარიანტი: CH2 არხი 2) |
| ანკ: 0 | მიმდინარე მოდული არის წამყვანი, ID=0
(ალტერნატიული ვარიანტი: Tag) |
| K | კალმანის ფილტრაცია ჩართულია (ჩვენების გარეშე:
გამორთულია) |
განვითარება და სწავლა files
განვითარებისა და სასწავლო მასალების სია, რომელსაც ჩვენ ვაძლევთ შეძენის შემდეგ:
ცხრილი 10-1 დოკუმენტები
| არა. | კატეგორია | File ტიპი |
| 1 | QT პროგრამული უზრუნველყოფის სწრაფი სახელმძღვანელო | |
| 2 | RTLS1-PDOA ორმხრივი დიაპაზონი
შეთანხმება |
|
| 3 | ULM3-PDOA_UserManual | |
| 4 | RTLS1-PDOA _ მომხმარებლის სახელმძღვანელო | |
| 5 | DW3000 UserManual by Qorvo | ZIP |
FAQ
სისტემა ღიაა?
სისტემა არის სრულიად ღია კოდირებული, მათ შორის ჩაშენებული კოდი, კომპიუტერის ზედა კოდი, ალგორითმი და ა.შ. გარდა ამისა, ის უზრუნველყოფს შესაბამის განვითარების სახელმძღვანელოებსა და ვიდეო გაკვეთილებს, რაც ეხმარება მომხმარებელს მარტივად დაიწყოს მეორადი განვითარება.
სისტემა მომწიფებულია? სჭირდება თუ არა მას ხელახალი განვითარება გამოყენებამდე?
სისტემა უკვე მომწიფებულია, ის უზრუნველყოფს პოზიციონირების სრულ ფუნქციას, რაც ნიშნავს, რომ მომხმარებელს შეუძლია მიიღოს პოზიციონირების მონაცემები პირდაპირ პორტების საშუალებით. ასევე, მომხმარებლებს შეუძლიათ განაახლონ სისტემა საკუთარი საჭიროებების დასაკმაყოფილებლად წყაროს კოდის რედაქტირების გზით.
რამდენი მოდული მჭირდება?
ეს დამოკიდებულია. აქ არის რამდენიმე ყოფილიamples:
- თუ თქვენ გჭირდებათ დიაპაზონი ერთიდან ერთამდე, მას სჭირდება ორი.
- თუ საჭიროა 2D პოზიციის დაყენება, მას სჭირდება 4, რომელიც მოიცავს 3 წამყვანს და 1 tag.
- თუ გჭირდებათ 3D პოზიციის დაყენება, მას სჭირდება მინიმუმ 5, რომელიც მოიცავს 4 წამყვანს და 1 tag.
- თუ უკვე გქონდათ ხელში მოდულები და გსურთ გაზარდოთ წამყვანების რაოდენობა ან tags, თქვენ უნდა შეიძინოთ დაკარგული მოდულების შესაბამისი ნომრები.
- თუ გჭირდებათ მე-10 პოზიცია tags, მაშინ თქვენ უნდა მიიღოთ 4 წამყვანი და 10 tags, რის შედეგადაც 14 მოდული.
ჩვენ გირჩევთ შეიძინოთ მინიმუმ 5 მოდული შემდეგი მიზეზების გამო:- 4 წამყვანმა პოზიციონირებამ შეიძლება დაიფაროს ორჯერ მეტი ფართობი, ვიდრე 3 წამყვანის პოზიციონირება.
- ტესტირების დროს ყოველთვის არის გარკვეული კომუნიკაციის უკმარისობა; 4 წამყვანის პოზიციონირების მეთოდისთვის ის დაასრულებს პოზიციონირებას 3-დან 4 წამყვანის მონაცემებით, მაგრამ 3 წამყვანის პოზიციონირების მეთოდისთვის საჭიროა პოზიციონირების დასრულება სამივე წამყვანის მონაცემებით, რაც იწვევს წარმატების მაჩვენებლის შემცირებას.
- ასევე, 4 წამყვანი და 1 tag შესაძლებელია გადაყენება 3 წამყვანზე და 2-ზე tags ასევე.
რა არის პოზიციონირების სიზუსტე? არის თუ არა სიზუსტე დაკავშირებული ტერიტორიასთან?
XY პოზიციონირებისთვის, სიზუსტე არის 10 სმ (CEP95); Z მიმართულებით, სიზუსტე არის 30 სმ (CEP95). არ არსებობს პირდაპირი კავშირი გამოყენების ზონასა და სიზუსტეს შორის. გამოყენების არეალის გაზრდისას არ არის შემცირებული სიზუსტე. მაგრამ უნდა აღინიშნოს, რომ ULM1-LD600-ისთვის საჭირო დიდი სიმძლავრისთვის, მას ექნება აშკარა მრავალმხრივი ეფექტი 5*5 სმ ფართობზე გამოყენებისას, ამიტომ გირჩევთ გამოიყენოთ იგი უფრო დიდ ფართობზე.
მოდულს აქვს ჭურვი? წყალგაუმტარია?
ULM1-ს არ აქვს გარსი, LD150/LD600-ს აქვს გარსი და გარე ანტენა. მაგრამ ჭურვი არ არის არც დალუქული და არც წყალგაუმტარი.
რამდენი ხანია ბატარეის ლოდინის დრო?
ეს დამოკიდებულია გარე ელექტრომომარაგების სიმძლავრეზე და ემისიის სიხშირეზე. ULM1-ისთვის, რომელიც აღჭურვილია შესატყვისი ელექტრომომარაგებით, წამყვანის ლოდინის დრო არის დაახლ. 10 საათი და tag ლოდინის დრო არის დაახლ. 12 საათი.
რა განსხვავებაა RTLS1, RTLS2, RTLS3 შორის?
RTLS1, RTLS2, RTLS3 არის მესამე თაობის UWB პოზიციონირების პროდუქტი, რომელიც შემუშავებულია ჩვენი კომპანიის მიერ.
- RTLS1 ეფუძნება STM32 პლატფორმის განვითარების კომპლექტს, ღია წყაროს და ხელმისაწვდომია ორი ტიპის მიხედვით: 50 მ და 600 მ. ეს შესაფერისია კვლევის შეფასებისთვის, UWB დისკის მეთოდის შესასწავლად, პროდუქტის წყაროს კოდის მიგრაციისთვის, სისტემური ინტეგრაციისთვის და ა.შ.
- RTLS2 არის პროდუქტიული მოწყობილობა, დახურული წყარო, კომუნიკაცია ეთერნეტით, WEB ინტერფეისი. ეს შესაფერისია პირდაპირ პროექტში განაცხადისთვის.
- RTLS3 დაფუძნებულია Arduino პლატფორმის განვითარების კომპლექტზე, ღია წყაროზე, ძირითადი დისკი არის ინკაფსულირებული და მარტივი ხელახლა განვითარება. ეს შესაფერისია სასწავლო შეფასებისთვის, განვითარების კვლევისთვის, კოლეჯში პროექტის შესწავლისთვის, სისტემური ინტეგრაციისთვის და ა.შ.
რა არის განახლების სიხშირე ამისთვის tag?
ნაგულისხმევი სიხშირე არის 112 ms, ის შეიძლება დაყენდეს 10ms (6.8Mhz) მინიმალური ხანგრძლივობისთვის, პროგრამული უზრუნველყოფის პარამეტრის შეცვლით.
როგორ უკავშირდება მოდული კომპიუტერს?
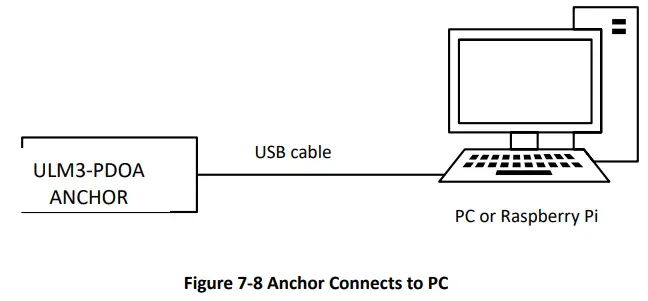
მოდული იყენებს USB პორტს კომპიუტერთან დასაკავშირებლად. კომპიუტერთან დასაკავშირებლად საჭიროა მხოლოდ 4-დან ერთი წამყვანი.
როგორ უკავშირდება მოდული სხვა ჩაშენებულ მოწყობილობებს?
მოდული იყენებს UART-TTL პორტს სხვა ჩაშენებულ მოწყობილობებთან დასაკავშირებლად.
მჭირდება სხვა აქსესუარების ყიდვა სისტემის შეძენის შემდეგ?
სისტემა უზრუნველყოფს შესაბამის პორტატულ დენის წყაროს და მონაცემთა კაბელს. თუ მომხმარებელს ესაჭიროება მისი გამოყენება ღია ცის ქვეშ და სჭირდება უკეთესი სტაბილურობა და სიზუსტე, ჩვენ გირჩევთ შეიძინოთ შტატივები წამყვანების დასაჭერად. სამფეხების სიმაღლე ჯობია არ აღემატებოდეს 3 მეტრს.
არის მოდულური სარჩელი დრონისთვის ან AGV-სთვის?
მისი გამოყენება დრონით ან AGV-სთვის არ არის პრობლემა. აქამდე ბევრი მომხმარებელი იყენებს მას ამ გზით და იღებს კარგ გამოხმაურებას.
ადვილი გამოსაყენებელია?
მარტივია სისტემის აშენება ვიდეო გაკვეთილის დახმარებით. ასევე ადვილია სისტემის ხელახალი განვითარება განვითარების სახელმძღვანელოს გამოყენებით, თუ მომხმარებელს აქვს ჩაშენებული განვითარების ფონური ცოდნა.
როდის შემიძლია მივიღო ტექნიკური მონაცემების სრული ნაკრები?
შეძენის შემდეგ, მომხმარებელმა ჯერ უნდა შექმნას სისტემა და დაასრულოს ტესტირება პაკეტში მოცემული ინფორმაციის მიხედვით, რათა დარწმუნდეს, რომ ფუნქცია დააკმაყოფილებს მის საჭიროებას. თუ პროდუქტი მომხმარებლისთვის შეესაბამება, გადახდის დადასტურების შემდეგ, ჩვენი მომხმარებლის სერვისი მომხმარებელს გაუგზავნის ყველა ტექნიკურ მონაცემს. თუ პროდუქტი არ აკმაყოფილებს მომხმარებლის საჭიროებას, მას შეუძლია დააბრუნოს პროდუქტი და დაბრუნდეს პროდუქტის გარეგნობის დაზიანების გარეშე. ტექნიკური მონაცემების მიღების შემდეგ პროდუქტი არ დაბრუნდება.
როგორ იმოქმედებს დაბრკოლებები პოზიციონირებაზე?
- კედელი: LD600-ს შეუძლია გაიაროს 1 მყარი კედელი, მაგრამ შეცდომა გაიზრდება დაახლოებით 30 სმ-ით, ეს დამოკიდებულია კედლის მასალასა და სისქეზე.
ULM1, ULM3 არ შეუძლია კედლების გავლა. - მავთულის ბოძი, ხეები და სხვა გრძელი და ვიწრო საგნები: დამოკიდებულია მანძილს შორის tags და წამყვანები. მაგample, თუ შორის მანძილი tag და წამყვანი არის 60 მ, დაბრკოლება მცირე როლს ითამაშებს შედეგის სიზუსტეზე. მაგრამ თუ მანძილი შორის tag და წამყვანი არის მხოლოდ 1 მ, ეს გავლენას მოახდენს შედეგზე დიდ ნაწილზე.
- მინა: შუშა გავლენას მოახდენს UWB პოზიციონირების სიზუსტეზე დიდ ნაწილზე.
- ფოლადი, რკინა და სხვა ლითონი: ლითონი შთანთქავს ელექტრომაგნიტურ ტალღას UWB-დან, განსაკუთრებით მაშინ, როდესაც ის დახურულია მოდულურისთვის. ის დაბლოკავს სიგნალს და არ გამოიწვევს შედეგს.
- მუყაო და ხის დაფა: შედეგზე დიდად არ იმოქმედებს, თუ სისქე არის დაახლოებით 10 სმ, მაგრამ სიგნალი მიიღებს შემცირებას.
რა არის შედეგის დაბალი სიზუსტის სავარაუდო მიზეზი.
- შეამოწმეთ სწორია თუ არა კომპიუტერის ზედა პროგრამული უზრუნველყოფის წამყვანი კოორდინატი.
- შეამოწმეთ არის თუ არა სამაგრის სიმაღლე 1.8 მ-ზე მეტი.
- შეამოწმეთ, არის თუ არა წამყვანების რომელიმე სიგნალი ძალიან სუსტი, შემდეგ სცადეთ გადაადგილება ანკერის უკეთესი სიგნალის მისაღებად.
- შეამოწმეთ არის თუ არა რაიმე დაბრკოლება მოდულს შორის.
- შეამოწმეთ, რომ ყველა წამყვანი ერთსა და იმავე სიბრტყეშია (თუ პროექტი მოითხოვს).
- შეამოწმეთ თუ არსებობს tag ძალიან შორს არის ყველა წამყვანისგან.
რატომ ამბობს ძალიან ახლოს წამყვანსა და წამყვანს შორის tag?
- საქალაქთაშორისო კომუნიკაციის შემთხვევაში, ჩვენ გირჩევთ გამოიყენოთ შტატივები წამყვანების დასაჭერად და tagsდა ასევე შეინარჩუნეთ სიმაღლე 1.8 მ-ზე ზემოთ ტესტირების დროს.
- შეამოწმეთ არის თუ არა დაბრკოლებები ან ძლიერი ელექტრომაგნიტური ჩარევა გარშემო.
- შეამოწმეთ თუ არა ანტენა სწორად დაყენებული.
Q: რა პოზიციონირების რეჟიმებს უჭერს მხარს HR-RTLS1-PDOA?
A: HR-RTLS1-PDOA მხარს უჭერს ფრენის დროის (TOF) და ჩამოსვლის ფაზის სხვაობის (PDOA) კუთხის გაზომვის რეჟიმებს.
დოკუმენტები / რესურსები
 |
HaoruTech RTLS1 პოზიციონირების მოდული [pdf] მომხმარებლის სახელმძღვანელო HR-RTLS1-PDOA, ULM3, RTLS1 პოზიციონირების მოდული, RTLS1, პოზიციონირების მოდული, მოდული |



