Netzer DS-25 17 ბიტიანი რეზოლუციის აბსოლუტური შიფრატორი

წინასიტყვაობა
- ვერსია 2.0: 2021 წლის ნოემბერი
მოქმედი დოკუმენტები
- DS-25 ელექტრო ენკოდერის მონაცემთა ფურცელი
ESD დაცვა
როგორც ყოველთვის ელექტრონული სქემებისთვის, პროდუქტის დამუშავებისას არ შეეხოთ ელექტრონულ სქემებს, სადენებს, კონექტორებს ან სენსორებს შესაბამისი ESD დაცვის გარეშე. ინტეგრატორმა/ოპერატორმა უნდა გამოიყენოს ESD აღჭურვილობა მიკროსქემის დაზიანების რისკის თავიდან ასაცილებლად.
ყურადღება
დაიცავით სიფრთხილის ზომები ელექტროსტატიკური მგრძნობიარე მოწყობილობების გამოყენებისას
პროდუქტი დასრულდაview
დასრულდაview
DS-25 აბსოლუტური პოზიციის Electric Encoder™ არის რევოლუციური პოზიციის სენსორი, რომელიც თავდაპირველად შეიქმნა მკაცრი გარემოს კრიტიკული აპლიკაციებისთვის. ამჟამად ის მუშაობს აპლიკაციების ფართო სპექტრში, მათ შორის თავდაცვის, სამშობლოს უსაფრთხოების, საჰაერო კოსმოსური და სამედიცინო და სამრეწველო ავტომატიზაციის ჩათვლით. Electric Encoder™ უკონტაქტო ტექნოლოგია ეყრდნობა ურთიერთქმედებას გაზომილ გადაადგილებასა და სივრცეში/დროში მოდულირებულ ელექტრულ ველს შორის. DS-25 Electric Encoder™ არის ნახევრად მოდულარული, ანუ, მისი როტორი და სტატორი ცალკეა, სტატორით უსაფრთხოდ იცავს როტორს.
- შიფრატორის სტატორი
- ენკოდერის როტორი
- ენკოდერის დამონტაჟება clamps
- როტორის შესაკრავი
- საკაბელო ინტერფეისი

ინსტალაციის ნაკადის სქემა
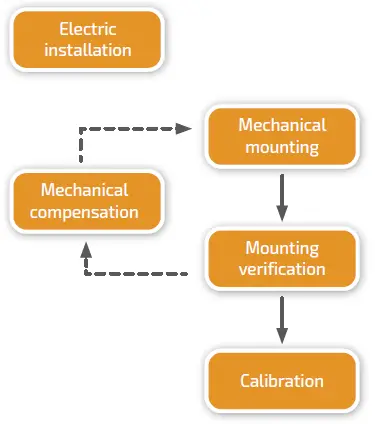
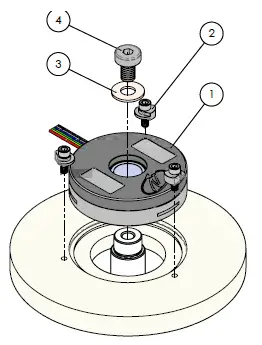
შიფრატორის მონტაჟი
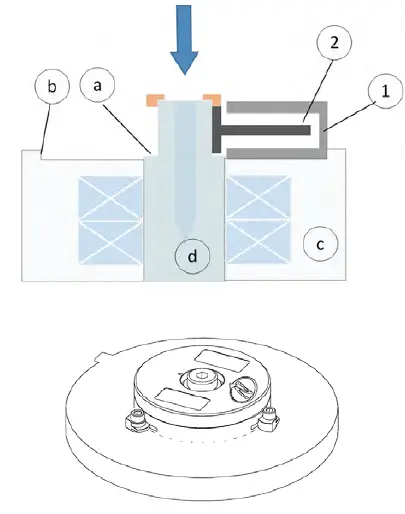
ენკოდერის როტორი (2) მიმაგრებულია მასპინძელ ლილვზე (d) დაჭერით მას ერთგულ მხარზე (a), ხრახნიანი და გამრეცხი ან წრიული ზამბარა და გამრეცხი მხრის ბოლოს, წნევის შესანარჩუნებლად, რეკომენდებული ძალა 0.3 ნმ. M3 ხრახნით.
ენკოდერის სტატორი (1) ცენტრირებულია წრეწირის საფეხურით (b) და მიმაგრებულია ჰოსტ სტატორზე (c) სამი ენკოდერის cl გამოყენებით.amps, რეკომენდირებული ძალა 0.3 Nm მოწოდებული კოდირებით clamps.
შენიშვნა:
არ გამოიყენოთ ციანოაკრილატის შემცველი ხრახნიანი საკეტი მასალები, რომლებიც აგრესიულად ურთიერთქმედებენ Ultem-ისგან დამზადებულ სენსორის სხეულთან.
შიფრატორის სტატორის/როტორის შედარებითი პოზიცია
როტორი მცურავია, ამიტომ სათანადო ფარდობითი ღერძული სამონტაჟო მანძილი "H" ლილვის მხრებს (b) და სტატორის სამონტაჟო ჭრილს შორის (a) უნდა იყოს ნომინალური 1.4 მმ.
მექანიკური დამონტაჟების კომპენსაციის გამარტივებისთვის როტორის ბორბლებით, რეკომენდებული მანძილი არის 1.4 - 0.05 მმ, რაც იძლევა ანალოგურ გამომავალს. ოპტიმალური რეკომენდირებულია ampლიტუდის მნიშვნელობები არის დიაპაზონის შუა რიცხვები Encoder Explorer-ის პროგრამულ უზრუნველყოფაში ნაჩვენები მნიშვნელობების მიხედვით და განსხვავდება ენკოდერის ტიპის მიხედვით.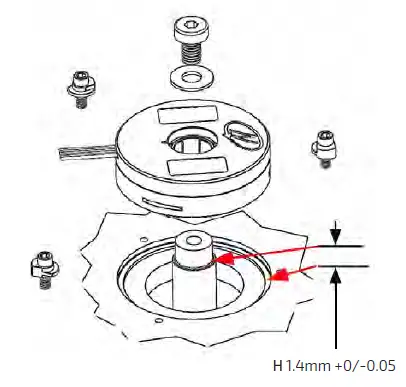
DS-25 ampლიტუდების კომპენსაცია
მექანიკური კომპენსაცია როტორის ქვემოთ 50 მმ-ის გამოყენებით (ხელმისაწვდომია როგორც DS-25-R-00 ნაკრები), გაზრდის ampლიტუდის დონე ~ 50 მვ-ით. გადაამოწმეთ როტორის სათანადო მონტაჟი Encoder Explorer-ის ხელსაწყოებით „სიგნალის ანალიზატორი“ ან „მექანიკური ინსტალაციის შემოწმება“.
შენიშვნა: დამატებითი ინფორმაციისთვის წაიკითხეთ მე-6 პუნქტი
ამოფუთვა
სტანდარტული შეკვეთა
სტანდარტული DS-25-ის პაკეტი შეიცავს ენკოდერს 250 მმ-იანი კაბელით AWG30 და EAPK004 ნაკრების ენკოდერის სამონტაჟო clampს, (3 კლamps, 0-80 UNF HEX სოკეტის ხრახნი L 3/16”, SS )
არჩევითი აქსესუარები:
- DS-25-R-00, Rotor shims ნაკრები (x10 უჟანგავი ფოლადის ბორბლები, თითო 50 მმ)
- MA-DS25-004, ლილვის ბოლო სამონტაჟო ნაკრები (M3x5 ხრახნი + გამრეცხი)
- CNV-00003, RS-422 USB-ზე გადამყვანი (დაყენების რეჟიმი)
- NanoMIC-KIT-01, RS-422 USB-ზე გადამყვანი. დაყენება და ოპერაციული რეჟიმები SSi /BiSS ინტერფეისის საშუალებით.
- DKIT-DS-25-SF-S0, დამონტაჟებული SSi ენკოდერი მბრუნავ ჯიგზე, RS-422 USB-ზე გადამყვანი და კაბელები.
- DKIT-DS-25-IF-S0, დამონტაჟებული BiSS ენკოდერი მბრუნავ ჯიგზე, RS-422 USB-ზე გადამყვანი და კაბელები.
ელექტრული ურთიერთდაკავშირება
ეს თავი რეviewეს არის ნაბიჯები, რომლებიც საჭიროა ენკოდერის ელექტრონულად დასაკავშირებლად ციფრულ ინტერფეისთან (SSi ან BiSS-C).
ენკოდერის დაკავშირება
კოდირს აქვს ორი ოპერაციული რეჟიმი:
აბსოლუტური პოზიცია SSi ან BiSS-C-ზე:
ეს არის ჩართვის ნაგულისხმევი რეჟიმი
SSi / BiSS ინტერფეისის მავთულის ფერის კოდი
| საათი + | რუხი |
საათი |
| საათი - | ლურჯი | |
| მონაცემები - | ყვითელი |
მონაცემები |
| მონაცემები + | მწვანე | |
| GND | შავი | ადგილზე |
| +5 ვ | წითელი | ელექტრომომარაგება |
დაყენების რეჟიმი NCP-ზე (Netzer საკომუნიკაციო პროტოკოლი)
სერვისის ეს რეჟიმი უზრუნველყოფს USB-ის საშუალებით წვდომას კომპიუტერზე, რომელიც მუშაობს Netzer Encoder Explorer აპლიკაციაზე (MS Windows 7/10). კომუნიკაცია ხდება Netzer საკომუნიკაციო პროტოკოლის (NCP) მეშვეობით RS-422-ზე, მავთულის იგივე ნაკრების გამოყენებით. გამოიყენეთ შემდეგი პინის მინიჭება ენკოდერის დასაკავშირებლად 9-პინიანი D ტიპის კონექტორთან RS-422/USB კონვერტორთან CNV-0003 ან NanoMIC-თან.
ელექტრო ენკოდერის ინტერფეისი, D ტიპის 9 პინი ქალი
| აღწერა | ფერი | ფუნქცია | პინი No |
|
SSi საათი / NCP RX |
რუხი | საათი / RX + | 2 |
| ლურჯი | საათი / RX – | 1 | |
|
SSi მონაცემები / NCP TX |
ყვითელი | მონაცემები / TX – | 4 |
| მწვანე | მონაცემები / TX + | 3 | |
| ადგილზე | შავი | GND | 5 |
| ელექტრომომარაგება | წითელი | +5 ვ | 8 |
ელექტრო კავშირი და დამიწება
კოდირს არ გააჩნია მითითებული კაბელი და კონექტორი, თუმცა, გაითვალისწინეთ დამიწების მოსაზრებები:
- საკაბელო ფარი არ უკავშირდება ელექტრომომარაგების დაბრუნების ხაზს.
- დაამაგრეთ მასპინძელი ლილვი, რათა თავიდან აიცილოთ ჩარევა მასპინძელი სისტემისგან, რამაც შეიძლება გამოიწვიოს კოდირების შიდა ხმაური.
შენიშვნა: საჭიროა 4.75-დან 5.25 VDC-მდე დენის წყარო
პროგრამული უზრუნველყოფის ინსტალაცია
Electric Encoder Explorer (EEE) პროგრამული უზრუნველყოფა:
- ამოწმებს მექანიკური დამონტაჟების სისწორეს
- ოფსეტების კალიბრაცია
- ადგენს ზოგად და სიგნალის ანალიზს
ეს თავი რეviewEEE პროგრამული აპლიკაციის ინსტალაციასთან დაკავშირებული ნაბიჯები.
მინიმალური მოთხოვნები
- ოპერაციული სისტემა: MS Windows 7/10, (32/64 ბიტი)
- მეხსიერება: 4 მბ მინიმუმი
- საკომუნიკაციო პორტები: USB 2
- Windows .NET Framework, V4 მინიმალური
პროგრამული უზრუნველყოფის ინსტალაცია
- გაუშვით Electric Encoder™ Explorer file ნაპოვნია ნეტცერზე webსაიტი: Encoder Explorer Software Tools
- ინსტალაციის შემდეგ, კომპიუტერის სამუშაო მაგიდაზე ნახავთ Electric Encoder Explorer პროგრამული უზრუნველყოფის ხატულას.
- დასაწყებად დააწკაპუნეთ Electric Encoder Explorer-ის პროგრამული უზრუნველყოფის ხატულაზე.
მონტაჟის შემოწმება
Encoder Explorer-ის გაშვება
დარწმუნდით, რომ წარმატებით შეასრულეთ შემდეგი ამოცანები:
- მექანიკური სამონტაჟო
- Ელექტრონული კავშირი
- კალიბრაციის შიფრატორის დაკავშირება
- Encoder Explore პროგრამული უზრუნველყოფის ინსტალაცია
გაუშვით Electric Encoder Explorer ინსტრუმენტი (EEE)
უზრუნველყოს სწორი კომუნიკაცია ენკოდერთან: (ნაგულისხმევად დაყენების რეჟიმი).
- სტატუსის ზოლი მიუთითებს წარმატებულ კომუნიკაციაზე.
- ენკოდერის მონაცემები გამოჩნდება ენკოდერის მონაცემთა ზონაში. (კატას ნომერი, სერიული ნომერი)
- პოზიციის ციფერბლატის ეკრანი რეაგირებს ლილვის ბრუნვაზე.
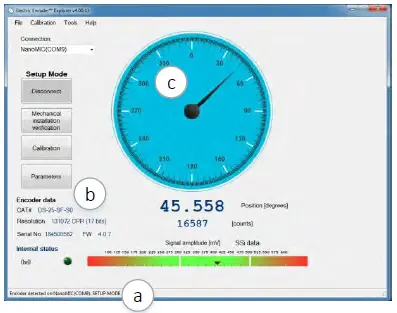
შეასრულეთ მონტაჟის შემოწმება და ბრუნვის მიმართულების შერჩევა დაკალიბრებამდე ოპტიმალური მუშაობის უზრუნველსაყოფად. ასევე რეკომენდირებულია დააკვირდეთ ინსტალაციას [Tools – Signal Analizer] ფანჯარაში.მექანიკური ინსტალაციის შემოწმება
მექანიკური ინსტალაციის შემოწმება უზრუნველყოფს პროცედურას, რომელიც უზრუნველყოფს სათანადო მექანიკურ დამონტაჟებას წვრილი და უხეში არხების ნედლეული მონაცემების შეგროვებით ბრუნვის დროს. - მთავარ ეკრანზე აირჩიეთ [Mechanical Mounting Verification].

- აირჩიეთ [დაწყება] მონაცემთა შეგროვების დასაწყებად.
- დაატრიალეთ ლილვი, რათა შეაგროვოთ წვრილი და უხეში არხების მონაცემები.
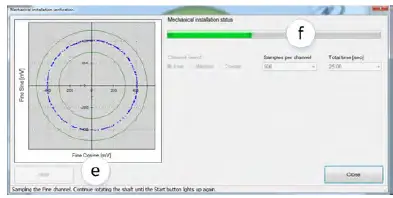
- წარმატებული შემოწმების დასასრულს, SW აჩვენებს "სწორი მექანიკური ინსტალაცია".
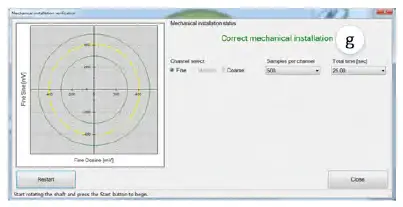
- თუ SW მიუთითებს "არასწორი მექანიკური ინსტალაცია", შეასწორეთ როტორის მექანიკური პოზიცია, როგორც წარმოდგენილია 3.3 პარაგრაფში - "როტორის შედარებითი პოზიცია".

კალიბრაცია
ახალი თვისება
ჩართულია ავტომატური კალიბრაციის ვარიანტი. იხილეთ დოკუმენტი: Auto-calibration-feature-user-manual-V01
ოფსეტური კალიბრაცია
ელექტრული ენკოდერების ოპტიმალური მუშაობისთვის, სინუსური და კოსინუსური სიგნალების გარდაუვალი DC ოფსეტი უნდა იყოს კომპენსირებული საოპერაციო სექტორში.
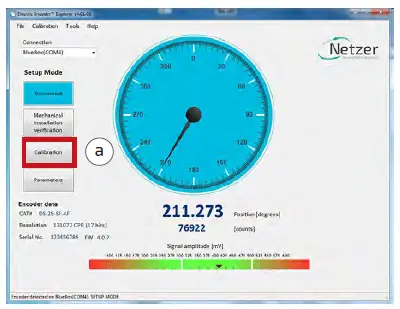
მონტაჟის შემოწმების პროცედურის წარმატებით დასრულების შემდეგ:
- აირჩიეთ [კალიბრაცია] მთავარ ეკრანზე.
- დაიწყეთ მონაცემთა შეგროვება ლილვის ბრუნვისას. პროგრესის ზოლი (c) მიუთითებს შეგროვების პროგრესს. ღერძის თანმიმდევრული როტაცია მონაცემთა შეგროვების დროს - მოიცავს აპლიკაციის სამუშაო სექტორს ბოლოდან ბოლომდე ნაგულისხმევად, პროცედურა აგროვებს 500 ქულას 75 წამში. ბრუნვის სიჩქარე არ არის პარამეტრი მონაცემთა შეგროვების დროს. მონაცემთა შეგროვების მითითება გვიჩვენებს წვრილ/მსხვილ არხებს, ცენტრში (d) (e) გამოჩნდება მკაფიო „თხელი“ წრე, გარკვეული გადახრით.
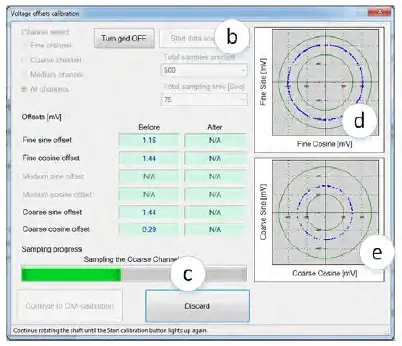
ოფსეტური კომპენსირებული ჯარიმა / Corse არხი 
CAA კალიბრაცია
შემდეგი კალიბრაცია ასწორებს უხეში/წვრილ არხს ორივე არხის თითოეული წერტილიდან მონაცემების შეგროვებით. აირჩიეთ [CAA Calibration-ზე გაგრძელება] CAA კუთხის კალიბრაციის ფანჯარაში აირჩიეთ შესაბამისი ოფციის ღილაკი გაზომვის დიაპაზონის ვარიანტებიდან (a):
- სრული მექანიკური როტაცია - ლილვის მოძრაობა 10 გრადუსზე მეტია - რეკომენდებულია.
- შეზღუდული განყოფილება - განსაზღვრეთ ლილვის მოქმედება შეზღუდული კუთხით, რომელიც განსაზღვრულია გრადუსით <10 გრადუსის შემთხვევაში.
- უფასო სampლინგის რეჟიმები - განსაზღვრეთ კალიბრაციის წერტილების რაოდენობა ტექსტურ ველში პუნქტების საერთო რაოდენობაში. სისტემა ნაგულისხმევად აჩვენებს ქულების რეკომენდებულ რაოდენობას. შეაგროვეთ მინიმუმ ცხრა ქულა სამუშაო სექტორზე.
- დააწკაპუნეთ ღილაკზე [Start Calibration] (b)
- სტატუსი (c) მიუთითებს შემდეგ საჭირო ოპერაციაზე; ლილვის მოძრაობის სტატუსი; მიმდინარე პოზიცია და შემდეგი სამიზნე პოზიცია, რომელზედაც უნდა შემობრუნდეს ენკოდერი.
- დაატრიალეთ ლილვი/კოდერი შემდეგ პოზიციაზე და დააჭირეთ ღილაკს [გაგრძელება] (c)
- ლილვი უნდა იყოს STAND STILL-ში მონაცემთა შეგროვების დროს. მიჰყევით მითითებებს/ურთიერთქმედებებს ლილვის განლაგების ციკლური პროცესის დროს –> გაჩერება –> წაკითხვის გაანგარიშება.
- გაიმეორეთ ზემოთ მოცემული ნაბიჯი ყველა განსაზღვრული წერტილისთვის. დასრულება (დ)
- დააჭირეთ ღილაკს [შენახვა და გაგრძელება] (e).
ბოლო ნაბიჯი ინახავს ოფსეტური CAA პარამეტრებს, დაასრულებს კალიბრაციის პროცესს.
ენკოდერის ნულოვანი წერტილის დაყენება
ნულოვანი პოზიცია შეიძლება განისაზღვროს სადმე სამუშაო სექტორში. გადაატრიალეთ ლილვი სასურველ ნულოვან მექანიკურ მდგომარეობაში. გადადით "Calibration" ღილაკზე ზედა მენიუს ზოლში და დააჭირეთ "Set UZP". აირჩიეთ „მიმდინარე პოზიციის დაყენება“ როგორც ნული შესაბამისი ოფციის გამოყენებით და დააწკაპუნეთ [დასრულება].
ჯიტერის ტესტი
შეასრულეთ ჯიტერის ტესტი ინსტალაციის ხარისხის შესაფასებლად; ჯიტერის ტესტი წარმოგიდგენთ აბსოლუტური პოზიციის წაკითხვის სტატისტიკას დროთა განმავლობაში. საერთო ჯიტერი უნდა იყოს +/- 3 რაოდენობა; უფრო მაღალი ჟიტერი შეიძლება მიუთითებდეს სისტემის ხმაურზე.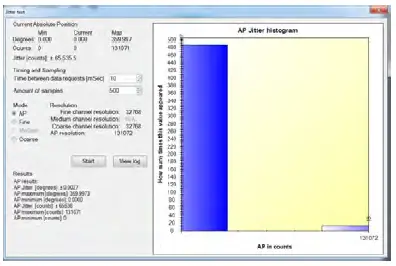
იმ შემთხვევაში, თუ წაკითხვის მონაცემები (ლურჯი წერტილები) თანაბრად არ არის განაწილებული თხელ წრეზე, შეიძლება განიცადოთ "ხმაური" თქვენს ინსტალაციაში (შეამოწმეთ ლილვის/სტატორის დამიწება).
ოპერაციული რეჟიმი
SSi/BiSS
SSi / BiSS Encoder ინტერფეისის ოპერაციული რეჟიმის მითითება, რომელიც ხელმისაწვდომია NanoMIC-ის გამოყენებით. დამატებითი ინფორმაციისთვის წაიკითხეთ NanoMIC-ის შესახებ Netzer-ზე webსაიტი ოპერაციული რეჟიმი წარმოადგენს "ნამდვილ" SSi / BiSS ინტერფეისს 1MHz საათის სიხშირით.
პროტოკოლი SSi
პროტოკოლი BiSS

მექანიკური ნახაზები

თუ სხვაგვარად არ არის მითითებული
| ზომებია: მმ | ზედაპირის დასრულება: N6 |
ხაზოვანი ტოლერანტები
| 0.5-4.9: ±0.05 მმ | 5-30: ±0.1 მმ |
| 31-120: ±0.15 მმ | 121-400: ±0.2 მმ |
DS-25 როტორის ლითონის ყდით


თუ სხვაგვარად არ არის მითითებული
| ზომებია: მმ | ზედაპირის დასრულება: N6 |
ხაზოვანი ტოლერანტები
| 0.5-4.9: ±0.05 მმ | 5-30: ±0.1 მმ |
| 31-120: ±0.15 მმ | 121-400: ±0.2 მმ |
ლილვი - ინსტალაციის დასრულება (ნაბიჯი)

თუ სხვაგვარად არ არის მითითებული
| ზომებია: მმ | ზედაპირის დასრულება: N6 |
ხაზოვანი ტოლერანტები
| 0.5-4.9: ±0.05 მმ | 5-30: ±0.1 მმ |
| 31-120: ±0.15 მმ | 121-400: ±0.2 მმ |
ნაწილი/აღწერილობა/რაოდენობა არ არის
| 1 | DS-25 | შედის | DS-25 შიფრატორი | 1 | |
| 2 | EAPK004 | შედის | ნაკრები 0-80” | 3 x Encoder clamps ნეილონი | 1 |
| 3 |
MA-DS25-004 |
სურვილისამებრ |
ლილვის ბოლო სამონტაჟო ნაკრები |
გამრეცხი DIN125-A3.2 | 1 |
| 4 | ხრახნი DIN 7984 M3x5 | 1 |
კრიტიკული ზომები აღინიშნება
გაფრთხილება
არ გამოიყენოთ Loctite ან სხვა წებოები, რომლებიც შეიცავს ციანოაკრილატს. ჩვენ გირჩევთ გამოიყენოთ 3M წებო - Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
ღრმა, ლილვი - დასრულება ინსტალაცია (ნაბიჯი)

თუ სხვაგვარად არ არის მითითებული
- ზომები არის: მმ ზედაპირის დასრულება: N6
ხაზოვანი ტოლერანტები
- 0.5-4.9: ±0.05 მმ 5-30: ±0.1 მმ
- 31-120: ±0.15 მმ 121-400: ±0.2 მმ
ნაწილი/აღწერილობა/რაოდენობა არ არის
| 1 | DS-25 | შედის | DS-25 შიფრატორი | 1 | |
| 2 | EAPK005 | სურვილისამებრ | ნაკრები | 3 x M2 ენკოდერი clamps | 1 |
| 3 |
MA-DS25-004 |
სურვილისამებრ |
ლილვის ბოლო სამონტაჟო ნაკრები |
გამრეცხი DIN125-A3.2 | 1 |
| 4 | ხრახნი DIN 7984 M3x5 | 1 |
კრიტიკული ზომები მონიშნულია „*“-ით
გაფრთხილება
არ გამოიყენოთ Loctite ან სხვა წებოები, რომლებიც შეიცავს ციანოაკრილატს. ჩვენ გირჩევთ გამოიყენოთ 3M წებო - Scotch-WeldTM Epoxy Adhesive EC-2216 B/A.
საავტორო უფლება © 2021 Netzer Precision Position Sensors ACS Ltd. ყველა უფლება დაცულია.
დოკუმენტები / რესურსები
 |
Netzer DS-25 17 ბიტიანი რეზოლუციის აბსოლუტური შიფრატორი [pdf] მომხმარებლის სახელმძღვანელო DS-25 17 ბიტიანი გარჩევადობის აბსოლუტური ენკოდერი, DS-25, 17 ბიტიანი რეზოლუციის აბსოლუტური შიფრატორი, რეზოლუციის აბსოლუტური შიფრატორი, აბსოლუტური შიფრატორი, შიფრატორი |



