![]()
Pickerbot Pro მომხმარებლის სახელმძღვანელო
გთხოვთ გაითვალისწინოთ, რომ ნაჩვენები სურათები მხოლოდ საილუსტრაციო მიზნებისთვისაა*.
ავტორები: უეინ ლიუ, რეილი სმიტერსი
3 წლის 2024 ივლისი
შეჯამება
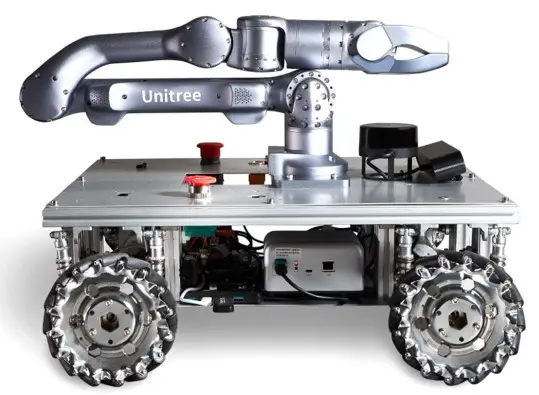
Pickerbot Pro არის მრავალმხრივი R&D რობოტიკის პლატფორმა, რომელიც შეიძლება გამოყენებულ იქნას სხვადასხვა აპლიკაციებისთვის, როგორც გარეთ, როგორიცაა სოფლის მეურნეობა, სამთო და მშენებლობა, და შიდა, მათ შორის რობოტების დახმარებით ლოჯისტიკა, საძიებო და სამაშველო დემონსტრაციები და რუქები.
Unitree Z1 Pro Robotic მკლავით 740 მმ-მდე და 3 კგ ტვირთამწეობით, Pickerbot Pro გთავაზობთ შთამბეჭდავ არტიკულაციას 6 გრადუსიანი თავისუფლებით, ძალის გამოხმაურებასთან და შეჯახების აღმოჩენის შესაძლებლობებთან ერთად.
აღჭურვილია NVIDIA Jetson Orin სერიის ერთი დაფის კომპიუტერით (ნანო ან NX ვარიანტი), ის უზრუნველყოფს უფრო მოწინავე კომპიუტერულ ხედვასა და მანქანათმცოდნეობის ამოცანებს მძლავრი გრაფიკით ან პარალელური გამოთვლითი ფუნქციებით CUDA-ს გამოყენებით, ამასთან, ინარჩუნებს კომპაქტურ და მსუბუქ დიზაინს.
Pickerbot Pro აღჭურვილია Orbbec 3D Astra კამერით, რომელიც უზრუნველყოფს სიღრმის ამოცნობის, ობიექტების თვალყურის დევნისა და ჟესტების ამოცნობის შესაძლებლობებს.
მყარ, მაგრამ მსუბუქ შასიზე აგებული Pickerbot Pro აღჭურვილია 4WD სისტემით დამოუკიდებელი შეჩერებით, გაუმჯობესებული ნავიგაციისთვის არათანაბარ რელიეფზე. დიდი მეკანუმის ბორბლები უზრუნველყოფენ ზუსტ ყოვლისმომცველ მოძრაობას, მაგრამ მაღალ დაჭერას.
ძირითადი კომპონენტები და აპარატურა
1.1 ROS 2 კონტროლერი: NVIDIA Jetson Orin (NX 8GB ან Nano 4GB)
ბორტ Jetson Orin-ის ერთბორტიანი კომპიუტერი უზრუნველყოფს ძლიერ ჩაშენებულ გამოთვლებს Pickerbot Pro-სთვის. მას გააჩნია 128 გბ SSD, Intel Wireless ბარათი და ბორტ ანტენები, HDMI, ოთხი USB პორტი (აქედან 3 USB 3.0), Ethernet და USB-C. DC ლულის ჯეკი დაფის კვებისათვის, 9-19 ვ-ის გამოყენებით. ბორტ GPIO ქინძისთავები იყენებენ იმავე ძირითად განლაგებას, როგორც პოპულარული Raspberry Pi-ის ერთ დაფის კომპიუტერები, დაწყებული პინი #1-ით გარე მწკრივზე, Ethernet პორტის მიმდებარედ. ანალოგიურად, ორი CSI კამერის კონექტორი საშუალებას აძლევს ფუნქციონირებას Raspberry Pi ბრენდით და მსგავსი მცირე ზომის კამერებით.
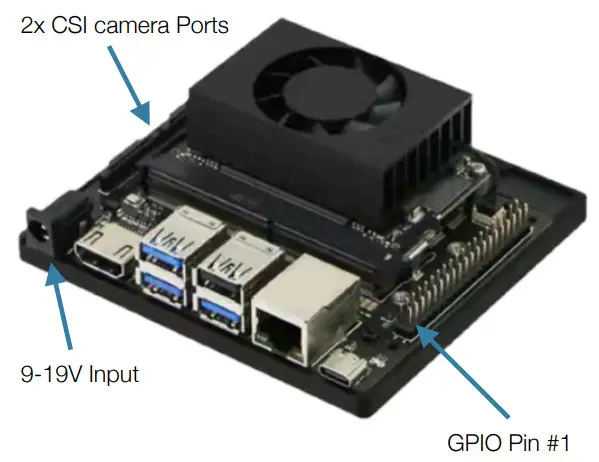
წინასწარ დაინსტალირებული პროგრამული უზრუნველყოფა მოიცავს ROS 2 Humble, Ubuntu 22.04 და NVIDIA Jetpack, რაც იძლევა Orin პლატფორმის სრულ შესაძლებლობებს.
შენიშვნა: შასის კონტროლერთან და რობოტის სხვა კომპონენტებთან თავსებადობის შესანარჩუნებლად, ჩვენ არ გირჩევთ Jetson Orin-ის ციმციმებს სხვადასხვა პროგრამული უზრუნველყოფით. უფრო მოწინავე გამოყენების შემთხვევებისთვის, გთხოვთ, დაუკავშირდეთ Roboworks-ის მხარდაჭერას.
1.2 სენსორული სისტემა: LiDAR და სიღრმის კამერა
Pickerbot Pro აღჭურვილია Leishen M10 LSLiDAR-ით. 30მ მაქსიმალური გამოვლენის დიაპაზონით და 12Hz ბრუნვის სკანირების სიხშირით და სიგნალის ხმაურის მაღალი თანაფარდობით, რაც გამორიცხავს დამატებითი ფილტრაციის საჭიროებას. იგი ინტეგრირდება უპრობლემოდ, უზრუნველყოფს შესანიშნავ რუკების და ნავიგაციის შესაძლებლობებს.
გარდა ამისა, Pickerbot Pro აღჭურვილია Orbbec Astra სიღრმის კამერით, რომელიც არის RGB სიღრმის კამერა. ეს კამერა ოპტიმიზებულია სხვადასხვა გამოყენებისთვის, მათ შორის ჟესტების კონტროლისთვის, ჩონჩხის თვალყურის დევნება, 3D სკანირება, ობიექტების ამოცნობა და წერტილოვანი ღრუბლის განვითარება ROS 2-ით.
| სიღრმის რეზოლუცია | RGB რეზოლუცია | RGB სენსორული კუთხე | სიღრმე FPS | RGB Framerate | სიღრმის ჩარჩო | სიღრმის დიაპაზონი |
| 640×480 | 640×480 | 63.1 × 49.4 ° | 58 × 45.5 ° | 30fps | 30fps | 0.6-4 მ |
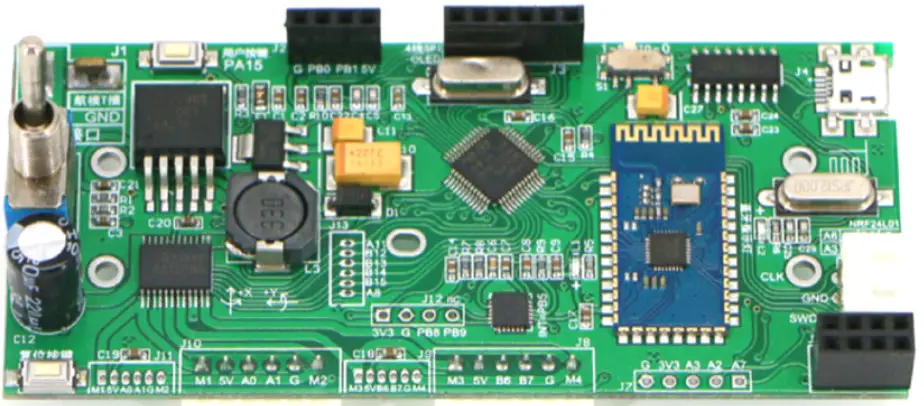
1.3 STM32 კონტროლის დაფა (ძრავის კონტროლი და IMU)
შასის და ძრავის კონტროლისთვის, Pickerbot Pro-ს აქვს STM32 მართვის დაფა. ეს დაფა უზრუნველყოფს დაბალი ენერგიის მოხმარებას, ძრავის ზუსტ კონტროლს, OLED დისპლეებს ძრავების მონიტორინგისთვის და ინერციული საზომი ერთეული (IMU). მისი კონფიგურაცია შესაძლებელია უფრო სპეციალიზებული მუშაობისთვის ან ენკოდერის გამოხმაურების გასააქტიურებლად Jetson Orin კონტროლერთან. პროგრამული პაკეტების Keil და FlyMCU გამოყენება STM32F103-ის შედგენისა და შემდგომი ფლეშისთვის.
| STM32F103RC | მახასიათებლები |
| ბირთვი | ARM32-bit Cortex -M3 CPU მაქსიმალური სიჩქარე 72 MHz |
| მოგონებები | 512 KB ფლეშ მეხსიერება 64 kB SRAM |
| საათი, გადატვირთვა და მიწოდების მენეჯმენტი | 2.0-დან 3.6 ვ აპლიკაციის მიწოდება და I/Os |
| ძალაუფლება | დაიძინე. გაჩერების და ლოდინის რეჟიმები V მიწოდება RTC-სთვის და სარეზერვო რეგისტრებისთვის BAT |
| DMA | 12 არხიანი DMA კონტროლერი |
| გამართვის რეჟიმი | SWD და ჯTAG ინტერფეისები Cortex-M3 ჩაშენებული კვალი მაკროცელი |
| I/O პორტები | 51 I/O პორტი (შესაძლებელია 16 გარე შეფერხების ვექტორზე და 5 ვ ტოლერანტზე) |
| ტაიმერები | 4×16 ბიტიანი ტაიმერი 2 x 16-ბიტიანი ძრავის მართვის PWM ტაიმერი (გადაუდებელი გაჩერებით) 2 x მცველი ტაიმერი (დამოუკიდებელი და ფანჯარა) SysTick ტაიმერი (24-ბიტიანი მთვლელი) 2 x 16-ბიტიანი ძირითადი ტაიმერი DAC-ის მართვისთვის |
| საკომუნიკაციო ინტერფეისი | USB 2.0 სრული სიჩქარის ინტერფეისი SDIO ინტერფეისი CAN ინტერფეისი (2.0B აქტიური) |
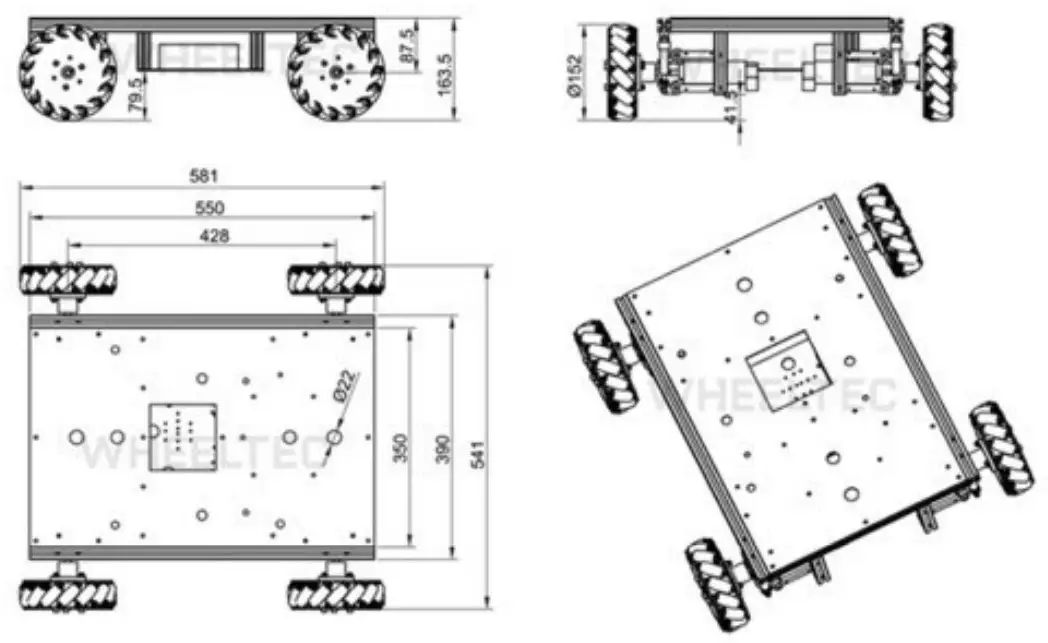
1.4 შასი დასრულდაview და ბატარეის პარამეტრები
Pickerbot Pro აღჭურვილია omnidirectional Mecanum ბორბლებით, თითოეულს აქვს 45 გრადუსიანი ოფსეტური ლილვაკები, რომლებიც ხელს უწყობს მოძრაობას ყველა მიმართულებით. მნიშვნელოვანია აღინიშნოს, რომ ეს ბორბლები მიწოდებულია წყვილებში, თითოეულ წყვილს აქვს განსხვავებული ორიენტირებული ლილვაკები. რობოტზე დაყენებისას დარწმუნდით, რომ დიაგონალურად მოპირდაპირე ბორბლებს აქვთ იმავე მიმართულებით მიმართული ლილვაკები. თუ რობოტი მოულოდნელად მოძრაობს, უბრალოდ დააბრუნეთ ბორბლების წყვილი.
გასათვალისწინებელია ბატარეის სიმძლავრის გაზრდისას. Pickerbot Pro-ს აქვს სტანდარტული 5000 mAh ბატარეა და შეიძლება განახლდეს 10,000 ან 20,000 mAh-მდე, დამატებითი ღირებულებით. 20,000 mAh ბატარეა ძალიან დიდია Pickerbot Pro-ის შასისში მოთავსებისთვის და მისი დაყენება შესაძლებელია მხოლოდ რობოტის შასის თავზე. გთხოვთ, იხილოთ ქვემოთ მოცემული ცხრილი წონისა და ზომის პარამეტრებისთვის.
| ბატარეის პარამეტრი | მახასიათებლები | ||
| 5000 mAh | 10000 mAh | 20000 mAh | |
| ბატარეის მოცულობაtage | 22.2 ვ | 22.2 ვ | 22.2 ვ |
| ზომა | 124*71*42 მმ | 124*71*71 მმ | 156*122*71 მმ |
| დენის დამტენი | DC 5.5 დამტენი შტეფსელი T- ფორმის გამონადენი |
DC 5.5 დამტენი შტეფსელი T- ფორმის გამონადენი |
DC 5.5 დამტენი შტეფსელი T- ფორმის გამონადენი |
| შესრულება | 15A უწყვეტი d არის დატენვა |
30A უწყვეტი გამონადენი | 60A უწყვეტი გამონადენი |
| წონა | 0.66 კგ | 1.25 კგ | 2.4 კგ |
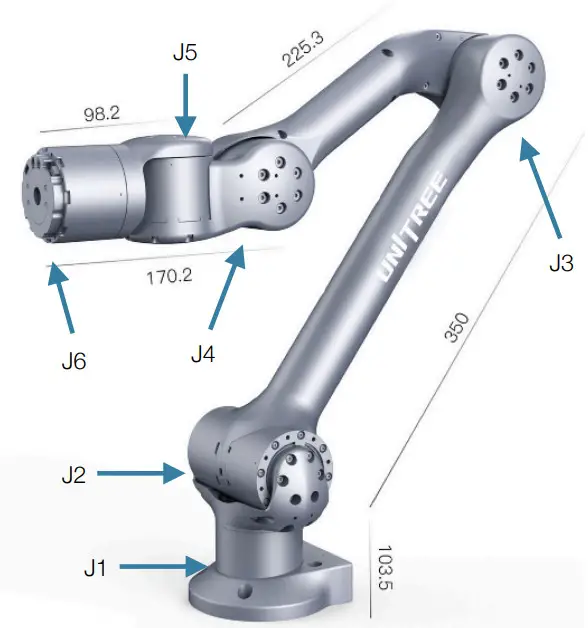
1.5 Unitree Z1 Pro რობოტული მკლავი
Pickerbot Pro აერთიანებს Unitree Z1 Pro რობოტულ მკლავს, რომელიც უზრუნველყოფს შთამბეჭდავ არტიკულაციას 6 გრადუსიანი თავისუფლებით და 740 მმ წვდომით. გთხოვთ, იხილოთ ერთობლივი პარამეტრის ცხრილი ქვემოთ, კინემატიკის მორგებისთვის, რათა დააკმაყოფილოს თქვენი სპეციფიკური მოთხოვნები.
| ერთობლივი | მოძრაობის დიაპაზონი | მაქსიმალური სიჩქარე | მაქს ბორკზე |
| J1 | ±150° | 180°/წმ | 33 N·მ |
| J2 | 0-180° | 180°/წმ | 33 N·მ |
| J3 | -165°-0 | 180°/წმ | 33 N·მ |
| J4 | ±80° | 180°/წმ | 33 N·მ |
| J5 | ±85° | 180°/წმ | 33 N·მ |
| J6 | ±160 | 180°/წმ | 33 N·მ |
| პარამეტრი | Z1 Pro |
| წონა | 4.5 კგ |
| ტვირთამწეობა | 3 კგ |
| მიღწევა | 740 მმ |
| განმეორებადობა | ~ 0.1 მმ |
| ელექტრომომარაგება | 24 ვ |
| ინტერფეისი | Ethernet |
| თავსებადი ოპერაციული სისტემა | უბუნტუ |
| მაქსიმალური სიმძლავრე | 500 W |
| იძულებითი გამოხმაურება | დიახ |
პროგრამული უზრუნველყოფა და დაწყება
2.1 ROS 2 სწრაფი დაწყება
როდესაც რობოტი პირველად ჩაირთვება, ის სტანდარტულად კონტროლდება ROS-ით. რაც იმას ნიშნავს, STM32 შასის კონტროლერის დაფა იღებს ბრძანებებს ROS 2 კონტროლერისგან - Jetson Orin.
საწყისი დაყენება სწრაფი და მარტივია, თქვენი მასპინძელი კომპიუტერიდან (რეკომენდებულია Ubuntu Linux) დაუკავშირდით რობოტის Wi-Fi ცხელ წერტილს. პაროლი ნაგულისხმევად არის "dongguan".
შემდეგი, დაუკავშირდით რობოტს SSH-ის გამოყენებით Linux ტერმინალის მეშვეობით, IP მისამართი არის 192.168.0.100, ნაგულისხმევი პაროლი არის dongguan.
![]()
რობოტზე ტერმინალის წვდომით, შეგიძლიათ ნავიგაცია ROS 2 სამუშაო სივრცის საქაღალდეში, "wheeltec_ROS 2"-ში სატესტო პროგრამების გაშვებამდე, გადადით wheeltec_ROS 2/turn_on_wheeltec_robot/-ზე და იპოვნეთ wheeltec_udev.sh – ეს სკრიპტი უნდა იყოს გაშვებული, როგორც წესი, მხოლოდ ერთხელ. პერიფერიული მოწყობილობების სათანადო კონფიგურაციის უზრუნველსაყოფად.
ახლა თქვენ შეგიძლიათ შეამოწმოთ რობოტის ფუნქციონირება, ROS 2 კონტროლერის ფუნქციონირების გასაშვებად, გაუშვით: „roslaunch turn_on_wheeltec_robot turn_on_wheeltec_robot.launch“
![]()
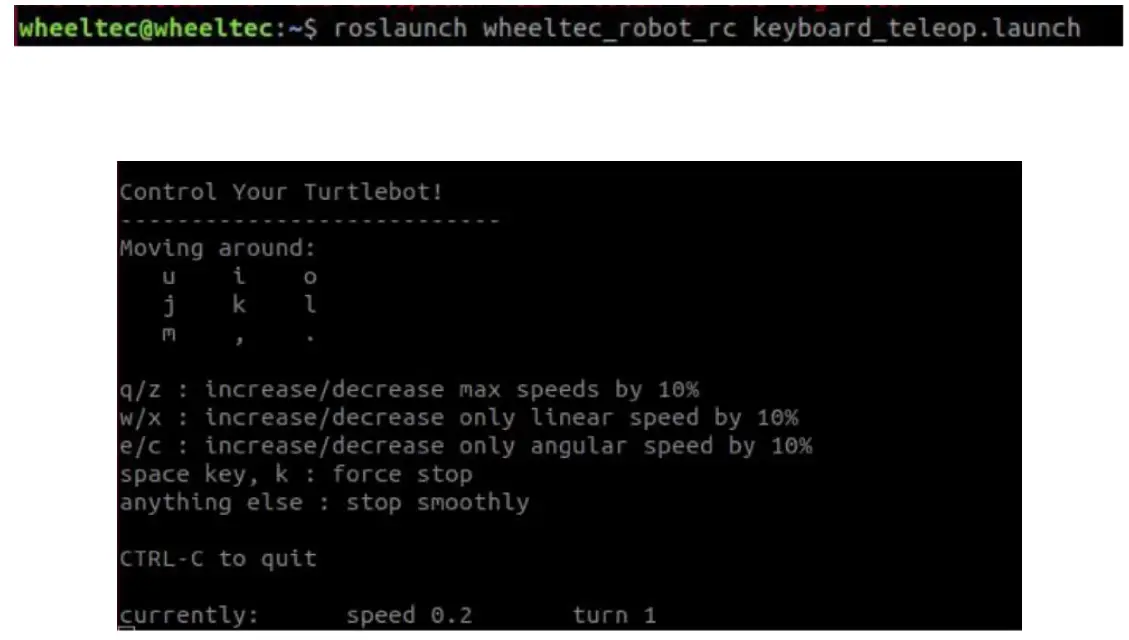
მეორე ტერმინალში შეგიძლიათ გამოიყენოთ keyboard_teleop კვანძი შასის კონტროლის დასადასტურებლად, ეს არის პოპულარული ROS 2 Turtlebot ex-ის შეცვლილი ვერსია.ampლე. ტიპი: „roslaunch wheeltec_robot_rc keyboard_teleop.launch“
2.2 წინასწარ დაინსტალირებული ROS 2 პაკეტები შასისთვის
ქვემოთ მოცემულია მომხმარებელზე ორიენტირებული შემდეგი პაკეტები, ხოლო სხვა პაკეტები შეიძლება იყოს, ეს მხოლოდ დამოკიდებულებებია.
turn_on_wheeltec_robot
ეს პაკეტი გადამწყვეტია რობოტის ფუნქციონირების გასააქტიურებლად და შასის კონტროლერთან კომუნიკაციისთვის.
პირველადი სკრიპტი "turn_on_wheeltec_robot.launch" უნდა იყოს გამოყენებული ყოველ ჩატვირთვისას ROS 2-ისა და კონტროლერის კონფიგურაციისთვის.
wheeltec_rviz2
შეიცავს გაშვების ფაილებს rviz-ის გასაშვებად Pickerbot Pro-სთვის მორგებული კონფიგურაციით.
wheeltec_robot_slam
SLAM რუკების და ლოკალიზაციის პაკეტი მორგებული კონფიგურაციით Pickerbot Pro-სთვის.
wheeltec_robot_rrt2
შემთხვევითი ხეების ალგორითმის სწრაფი შესწავლა – ეს პაკეტი Pickerbot Pro-ს საშუალებას აძლევს დაგეგმოს გზა სასურველ ადგილამდე, საძიებო კვანძების გაშვებით.
wheeltec_robot_კლავიატურა
მოსახერხებელი პაკეტი რობოტის ფუნქციონირების დასადასტურებლად და კლავიატურის გამოყენებით კონტროლისთვის, მათ შორის დისტანციური მასპინძელი კომპიუტერიდან.
wheeltec_robot_nav2
ROS 2 ნავიგაცია 2 კვანძის პაკეტი.
wheeltec_lidar_ROS 2
ROS 2 Lidar პაკეტი Leishen M10/N10 კონფიგურაციისთვის.
wheeltec_joy
ჯოისტიკის კონტროლის პაკეტი, შეიცავს გაშვების ფაილებს ჯოისტიკის კვანძებისთვის.
simple_follower_ROS 2
ძირითადი ობიექტი და ხაზის შემდგომი ალგორითმები ლაზერული სკანირების ან სიღრმისეული კამერის გამოყენებით.
ROS 2_astra_კამერა
Astra სიღრმისეული კამერის პაკეტი დრაივერებით და გაშვების ფაილებით.
რობოტული მკლავის ინტეგრაცია
3.1 რობოტული მკლავის გაყვანილობის კომპონენტები
Unitree Z1 რეკომენდებული გაყვანილობა
ქვემოთ მოცემულია გაყვანილობის რეკომენდებული კომპონენტები Unitree Z1 მკლავისთვის. უნდა იყოს ხელმისაწვდომი მდედრობითი სქესის 2-პოლუსიანი დეკანის კონექტორი დენის ჩამრთველის შემდეგ გარღვევაზე. შეაერთეთ კომპონენტები სერიულად. დარწმუნდით, რომ კონექტორი +/GND კავშირები ემთხვევა. დანის დაუკრავენ დამჭერი უნდა იჯდეს დადებით ელექტროგადამცემ ხაზზე.
| კომპონენტი | რაოდენობა |
| მამრობითი დეკანის სტილის 2 ბოძიანი კონექტორი | x1 |
| მამრობითი xt60 სტილის 2 ბოძიანი კონექტორი | x1 |
| Inline blade დაუკრავენ დამჭერი | x1 |
| 14 AWG 2 ბირთვიანი კაბელი | x1 |
| 7.5 დანის დაუკრავენ | x1 |
იმის გამო, რომ მკლავს აქვს მხოლოდ ფარდობითი შიფრები, ის უნდა დაბრუნდეს იმავე პოზიციაზე ყოველი გაშვებისას. შეიძლება ღირდეს კაბელში გადამრთველის მიმაგრება, რათა ადვილად ჩართოთ და გამორთოთ მკლავი გადატვირთვისთვის.
შენიშვნა: Unitree დოკუმენტაცია ამბობს, რომ მკლავი შეფასებულია 20A-სთვის. ეს არასწორია. 10A SMD დაუკრავენ სერიულად მიმაგრებულია თითოეული კვების წყაროსთვის. 7.5A დაუკრავის გამოყენება იფეთქებს 10A SMD დაუკრავენამდე და საგრძნობლად ადვილი იქნება ჩანაცვლება.
შენიშვნა: სისტემაზე ერთიანი Z1 მკლავის ზედმეტი წონის გამო წინა ზამბარები ვერ ახერხებენ მკლავის მხარდაჭერას. 70მმ*16მმ-იანი შეკუმშვის ზამბარები შეიძლება მოიძებნოს და გამოიყენოთ საფონდო ზამბარების ნაცვლად. ალტერნატიულად, შეიძლება გამოყენებულ იქნას დიდი ზამბარები, რომლებიც მოიცავს დარტყმას.
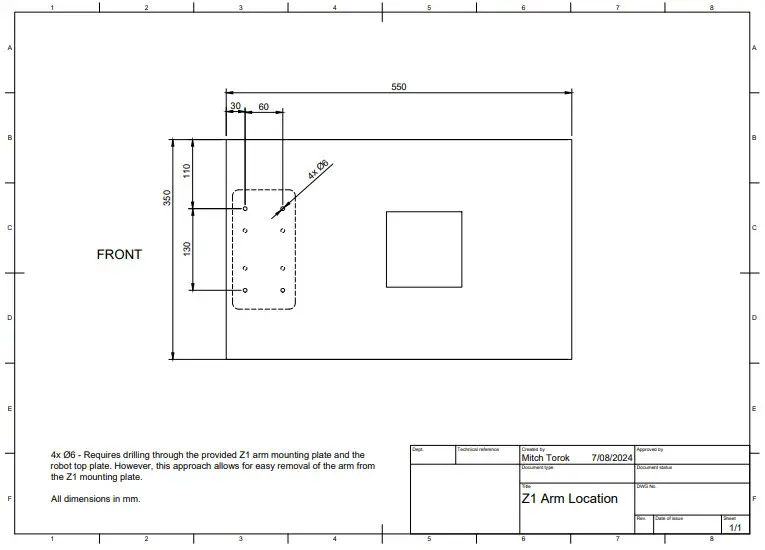
3.2 რობოტული მკლავის სამონტაჟო ნახატები
3.3 სampკოდი რობოტული მკლავისთვის
ამ მომხმარებლის სახელმძღვანელოს მომზადებისას Unitree-ს SDK Z1 Pro-სთვის მხოლოდ ROS 1 Melodic-ის ან Noetic-ის მხარდაჭერა აქვს.
Pickerbot Pro პროდუქტის გუნდმა შეიმუშავა სample კოდი ROS 2 Humble-ში, თავსებადი შასისთან.
სampZ1 Pro რობოტული მკლავის შასისთან ინტეგრაციის კოდი შეგიძლიათ იხილოთ ქვემოთ მოცემულ GitHub საცავში:
https://github.com/roboworksdev/pickerbotproarm
www.roboworks.net
საავტორო უფლება © 2024 Roboworks. Ყველა უფლება დაცულია.
დოკუმენტები / რესურსები
 |
ROBOWORKS Pickerbot Pro Pick and Drop Mobile Robot [pdf] მომხმარებლის სახელმძღვანელო Pickerbot Pro, Pickerbot Pro Pick and Drop Mobile Robot, Pick and Drop Mobile Robot, Drop Mobile Robot, Mobile Robot, Robot |