![]()
UM980 All Constellation Multi Frequency High Precision RTK პოზიციონირების მოდული
 მონტაჟი და ექსპლუატაცია
მონტაჟი და ექსპლუატაცია
მომხმარებლის სახელმძღვანელო
WWW.UNICORECOMM.COM
UM980
BDS/GPS/GLONASS/Galileo/QZSS
ყველა თანავარსკვლავედი მრავალ სიხშირე
მაღალი სიზუსტის RTK პოზიციონირების მოდული
საავტორო უფლება© 2009-2023, Unicore Communications, Inc.
მონაცემები შეიძლება შეიცვალოს გაფრთხილების გარეშე.
გადასინჯვის ისტორია
|
ვერსია |
გადასინჯვის ისტორია |
თარიღი |
| R1.0 | პირველი გამოშვება | 2022-08 წწ |
| R1.1 | თუ ცხელი დაწყება არ არის გამოყენებული, V_BCKP უნდა იყოს დაკავშირებული VCC-სთან; განაახლეთ IO ბარიერი ცხრილში 2-4; დაამატეთ სექცია 3.1: UM980 მინიმალური დიზაინი; განაახლეთ შაბლონის რეკომენდებული სისქე მე-4 თავში |
2022-10 წწ |
| R1.2 | განაახლეთ მხარდაჭერილი სიხშირეები; განაახლეთ TTFF; დაამატეთ თავი 3.5: რეკომენდებული PCB პაკეტის დიზაინი; ოპტიმიზაცია თავი 3.2 ანტენის მიწოდების დიზაინი; ოპტიმიზაცია თავი 3.3 ჩართვა და გამორთვა |
2023-04 წწ |
UM980 მომხმარებლის სახელმძღვანელო
კანონიერი უფლება შენიშვნა
ეს სახელმძღვანელო შეიცავს ინფორმაციას და დეტალებს Unicore Communication, Inc.-ის („Unicore“) პროდუქტების შესახებ, რომლებიც მოხსენიებულია აქ.
ყველა უფლება, სათაური და ინტერესი ამ დოკუმენტზე და ინფორმაციაზე, როგორიცაა მონაცემები, დიზაინი, განლაგება, რომელიც შეიცავს ამ სახელმძღვანელოში, სრულად არის დაცული, მათ შორის, მაგრამ არ შემოიფარგლება საავტორო უფლებებით, პატენტებით, სავაჭრო ნიშნებით და სხვა საკუთრების უფლებით, როგორც შესაბამისი მარეგულირებელი კანონმდებლობა შეიძლება მიანიჭოს, და ასეთი უფლებები შეიძლება განვითარდეს და დამტკიცებული, დარეგისტრირებული ან მინიჭებული იყოს ზემოაღნიშნული მთელი ინფორმაციის ან მისი რომელიმე ნაწილი(ებ)ის ან ამ ნაწილების ნებისმიერი კომბინაციიდან. Unicore ფლობს "UNICORECOMM"-ის სასაქონლო ნიშანს და სხვა სავაჭრო ნიშანს, სავაჭრო ნიშანს, ხატულას, ლოგოს, ბრენდის სახელს და/ან მომსახურების ნიშანს Unicore-ის პროდუქტების ან მათი პროდუქტის სერიების შესახებ, რომლებიც მითითებულია ამ სახელმძღვანელოში (ერთობლივად "Unicore სავაჭრო ნიშნები"). ეს სახელმძღვანელო ან მისი რომელიმე ნაწილი არ უნდა ჩაითვალოს, როგორც ცალსახად, ნაგულისხმევი, როგორც ესტოპელის ან სხვა ფორმით, Unicore უფლებების და/ან ინტერესების მინიჭება ან გადაცემა (მათ შორის, მაგრამ არ შემოიფარგლება აღნიშნული სავაჭრო ნიშნის უფლებებით), მთლიანად ან ნაწილობრივ.
პასუხისმგებლობის უარყოფა
ამ სახელმძღვანელოში მოცემული ინფორმაცია მოწოდებულია „როგორც არის“ და ითვლება ჭეშმარიტად და მართებულად მისი გამოქვეყნების ან გადასინჯვის დროს. ეს სახელმძღვანელო არ წარმოადგენს და, ნებისმიერ შემთხვევაში, არ უნდა იქნას გაგებული, როგორც ვალდებულება ან გარანტია Unicore-ის მხრიდან კონკრეტული მიზნისთვის/გამოყენებისთვის ვარგისიანობასთან დაკავშირებით, აქ მოცემული ინფორმაციის სიზუსტეს, სანდოობასა და სისწორესთან დაკავშირებით.
ინფორმაცია, როგორიცაა პროდუქტის სპეციფიკაციები, აღწერილობები, ფუნქციები და მომხმარებლის სახელმძღვანელო ამ სახელმძღვანელოში, ექვემდებარება შეცვლას Unicore-ის მიერ ნებისმიერ დროს წინასწარი შეტყობინების გარეშე, რაც შეიძლება სრულად არ შეესაბამებოდეს თქვენ მიერ შეძენილი კონკრეტული პროდუქტის ასეთ ინფორმაციას.
თუ თქვენ იყიდით ჩვენს პროდუქტს და შეხვდებით რაიმე შეუსაბამობას, გთხოვთ, დაგვიკავშირდეთ ჩვენ ან ჩვენს ადგილობრივ ავტორიზებულ დისტრიბუტორს ამ სახელმძღვანელოს ყველაზე განახლებული ვერსიისთვის, ნებისმიერი დამატებების ან კორექტირების შესახებ.
წინასიტყვაობა
ეს დოკუმენტი აღწერს ინფორმაციას ტექნიკის, პაკეტის, სპეციფიკაციისა და Unicore UM980 მოდულების გამოყენების შესახებ.
სამიზნე მკითხველები
ეს დოკუმენტი ეხება ტექნიკოსებს, რომლებსაც აქვთ გამოცდილება GNSS მიმღებებზე.
შესავალი
UM980 არის ახალი თაობის GNSS მაღალი სიზუსტის RTK პოზიციონირების მოდული Unicore-სგან. იგი მხარს უჭერს ყველა თანავარსკვლავედს და ყველა სიხშირეს და შეუძლია ერთდროულად აკონტროლოს BDS B1I/B2I/B3I/B1C/B2a/B2b, GPS L1/L2/L5, GLONASS G1/G2/G3, Galileo E1/E5a/E5b/E6, QZSS L1. /L2/L5, NavIC L5 და SBAS. მოდული ძირითადად გამოიყენება გამოკვლევისა და რუქების, ზუსტი სოფლის მეურნეობის, უპილოტო საფრენი აპარატების და ავტონომიური რობოტების დროს. UM980 დაფუძნებულია NebulasIVTM-ზე, GNSS SoC-ზე, რომელიც აერთიანებს RF-ბაზის ზოლს და მაღალი სიზუსტის ალგორითმს. გარდა ამისა, SoC აერთიანებს ორბირთვიან პროცესორს, მაღალსიჩქარიან მცურავი წერტილის პროცესორს და RTK თანაპროცესორს 22 ნმ დაბალი სიმძლავრის დიზაინით და მხარს უჭერს 1408 სუპერ არხს. ყოველივე ზემოთქმული საშუალებას იძლევა უფრო ძლიერი სიგნალის დამუშავება. ჩაშენებული JamShield ადაპტირებადი შეფერხების ტექნოლოგიით, UM980-ს შეუძლია შეასრულოს RTK ძრავის გაძლიერებული გადაწყვეტა მრავალრეჟიმიანი მრავალ სიხშირით, რაც უზრუნველყოფს კარგ შესრულებას RTK ინიციალიზაციის სიჩქარეზე, გაზომვის სიზუსტესა და საიმედოობაზე ყველაზე რთულ გარემოშიც კი, როგორიცაა ურბანული კანიონები და ხეების ჩრდილები. გარდა ამისა, UM980 მხარს უჭერს უამრავ ინტერფეისს, როგორიცაა UART, I 2 * C , SPI * , ასევე 1PPS, EVENT, CAN * , რომელიც აკმაყოფილებს მომხმარებელთა საჭიროებებს სხვადასხვა აპლიკაციებში.  1.1 ძირითადი მახასიათებლები
1.1 ძირითადი მახასიათებლები
- დაფუძნებულია ახალი თაობის GNSS SoC -NebulasⅣTM, RF ბაზის ზოლით და ინტეგრირებული მაღალი სიზუსტის ალგორითმით
- 17 მმ × 22 მმ × 2.6 მმ, ზედაპირზე დასამაგრებელი მოწყობილობა
- მხარს უჭერს ყველა თანავარსკვლავედის მრავალ სიხშირის ჩიპზე RTK პოზიციონირების გადაწყვეტას
- მხარს უჭერს BDS B1I/B2I/B3I/B1C/B2a/B2b + GPS L1/L2/L5 + GLONASS G1/G2/G3 + Galileo E1/E5a/E5b/E6 + QZSS L1/L2/L5 + NavIC L5 + SBAS
- ყველა თანავარსკვლავედის მრავალსიხშირიანი RTK ძრავა და მოწინავე RTK დამუშავების ტექნოლოგია
- მყისიერი RTK ინიციალიზაციის ტექნოლოგია
- სხვადასხვა სიხშირეების დამოუკიდებელი თვალყურის დევნება და 60 დბ ვიწროზოლიანი ჩახშობის საწინააღმდეგო ტექნოლოგია
1.2 ძირითადი სპეციფიკაციები
ცხრილი 1-1 ტექნიკური მახასიათებლები
| ძირითადი ინფორმაცია | |
| არხები | 1408 არხი, დაფუძნებული NebulasIV-ზე |
| თანავარსკვლავედები | BDS/GPS/GLONASS/Galileo/QZSS |
| სიხშირეები | BDS: B1I, B2I, B3I, B1C, B2a, B2b GPS: L1 C/A, L1C, L2P (Y), L2C, L5 GLONASS: G1, G2, G3 გალილეო: E1, E5a, E5b, E6 QZSS: L1, L2, L5 საზღვაო: L5 |
| ძალაუფლება | |
| ტtage | +3.0 V ~ +3.6 V DC |
| ენერგიის მოხმარება | 480 მვტ (ტიპიური) |
შესრულება
| პოზიციონირების სიზუსტე | ერთი წერტილის პოზიციონირება) (RMS) | ჰორიზონტალური: 1.5 მ | ||
| ვერტიკალური: 2.5 მ | ||||
| DGPS (RMS) 12 | ჰორიზონტალური: 0.4 მ | |||
| ვერტიკალური: 0.8 მ | ||||
| RTK (RMS) 12 | ჰორიზონტალური: 0.8 სმ + 1 ppm | |||
| ვერტიკალური: 1.5 სმ + 1 ppm | ||||
| დაკვირვების სიზუსტე (RMS) | BDS | GPS | გლონასი | გალილეო |
| BB/BIC/LIG/Li C/A/GI/El Pseudorange | 10 სმ | 10 სმ | 10 სმ | 10 სმ |
| B11/B1C/L1C/L1 C/A/GI/El Carrier ფაზა | 1 მმ | 1 მმ | 1 მმ | 1 მმ |
| B3I/L2P(Y)/L2C/G2/E6 Pseudorange | 10 სმ | 10 სმ | 10 სმ | 10 სმ |
| B31/12P(Y)/L2C/G2/E6 Carrier Phase | 1 მმ | 1 მმ | 1 მმ | 1 მმ |
| B2I/B2a/B2b/L5/G3/E5a/E5b Pseudorange | 10 სმ | 10 სმ | 10 სმ | 10 სმ |
| B21/B2a/B2b/L5/G3/E5a/E5b Carrier Phase | 1 მმ | 1 მმ | 1 მმ | 1 მმ |
| დროის პულსის სიზუსტე (RMS) | 20 წმ | |||
| სიჩქარის სიზუსტე 3 (RMS) | 0.03 მ/წმ | |||
- ტესტის შედეგები შეიძლება იყოს მიკერძოებული ატმოსფერული პირობების, საბაზისო სიგრძის, GNSS ანტენის ტიპის, მრავალმხრივი, ხილული თანამგზავრების რაოდენობის და სატელიტური გეომეტრიის გამო.
- გაზომვა იყენებს 1 კმ საბაზისო ხაზს და მიმღებს ანტენის კარგი შესრულებით, ანტენის ფაზის ცენტრის ოფსეტური შესაძლო შეცდომების მიუხედავად.
- ღია ცა, შეუფერხებელი სცენა, 99% @ სტატიკური
| პირველი გამოსწორების დრო 4 (TTFF) | ცივი დაწყება < 12 წმ |
| ცხელი დაწყება < 4 წმ | |
| ინიციალიზაციის დრო 1 | < 5 წმ (ტიპიური) |
| ინიციალიზაციის საიმედოობა1 | > 99.9% |
| მონაცემთა განახლების სიჩქარე | 50 Hz5 პოზიციონირება |
| დიფერენციალური მონაცემები | RTCM 3.X |
| მონაცემთა ფორმატი | NMEA-0183, Unicore |
| ფიზიკური მახასიათებლები | |
| პაკეტი | 54 პინი LGA |
| ზომები | 22 მმ × 17 მმ × 2.6 მმ |
| წონა | 1.88 გ ± 0.03 გ |
| გარემოსდაცვითი სპეციფიკაციები | |
| ოპერაციული ტემპერატურა | -40 °C ~ +85 °C |
| შენახვის ტემპერატურა | -55 °C ~ +95 °C |
| ტენიანობა | 95% კონდენსაციის გარეშე |
| ვიბრაცია | GJB150.16A-2009, MIL-STD-810F |
| შოკი | GJB150.18A-2009, MIL-STD-810F |
| ფუნქციური პორტები | |
| UART × 3 | |
| 2 I * C × 1 | |
| SPI* × 1 | მონა |
| შეიძლება * × 1 | გაზიარებულია UART3-თან |
* I 2 C, SPI, CAN: დაცული ინტერფეისები, ამჟამად არ არის მხარდაჭერილი
4 -130dBm @ 12-ზე მეტი ხელმისაწვდომი თანამგზავრი
5 მხარს უჭერს 50 ჰც სიხშირეს პროგრამული უზრუნველყოფის განახლების შემდეგ
1.3 ბლოკის დიაგრამა

- RF ნაწილი
მიმღები იღებს გაფილტრულ და გაძლიერებულ GNSS სიგნალს ანტენიდან კოაქსიალური კაბელის საშუალებით. RF ნაწილი გარდაქმნის RF შეყვანის სიგნალებს IF სიგნალებად და გარდაქმნის IF ანალოგურ სიგნალებს ციფრულ სიგნალებად, რომლებიც საჭიროა NebulasIV TM ჩიპისთვის (UC9810). - NebulasIVTM SoC (UC9810)
NebulasIV (UC9810) არის UNICORECOMM-ის ახალი თაობის მაღალი სიზუსტის GNSS SoC 22 ნმ დაბალი სიმძლავრის დიზაინით, მხარს უჭერს ყველა თანავარსკვლავედს, ყველა სიხშირეს და 1408 სუპერ არხს. იგი აერთიანებს ორბირთვიან პროცესორს, მაღალსიჩქარიან მცურავი წერტილის პროცესორს და RTK თანაპროცესორს, რომელსაც შეუძლია დამოუკიდებლად შეასრულოს მაღალი სიზუსტის ბაზისური დამუშავება და RTK პოზიციონირება. - გარე ინტერფეისი
UM980-ის გარე ინტერფეისები მოიცავს UART, I 2 * C , SPI * , CAN * , PPS, EVENT, RTK_STAT, PVT_STAT, ERR_STAT, RESET_N და ა.შ.
აპარატურა
2.1 პინის განმარტება  ცხრილი 2-1 პინის აღწერა
ცხრილი 2-1 პინის აღწერა
| არა. | პინი | I/O | აღწერა |
| 1 | GND | — | ადგილზე |
| 2 | ANT_IN | I | GNSS ანტენის სიგნალის შეყვანა |
| 3 | GND | — | ადგილზე |
| 4 | ANT_DETECT | I | ანტენის სიგნალის გამოვლენა |
| 5 | ANT_OFF | O | გამორთეთ გარე LNA |
| 6 | ANT_SHORT_N | I | ანტენის მოკლე ჩართვის გამოვლენა; აქტიური დაბალი |
| 7 | VCC_RF6 | O | გარე LNA კვების წყარო |
| 8 | SPIS_CSN | I | ჩიპის არჩევის პინი SPI სლავისთვის |
| 9 | SPIS_MOSI | I | Master Out / Slave In. ეს პინი გამოიყენება მონურ რეჟიმში მონაცემების მისაღებად. |
| 10 | SPIS_CLK | I | საათის შეყვანის პინი SPI სლავისთვის |
| 11 | SPIS_MISO | O | Master In / Slave Out. ეს პინი გამოიყენება მონურ რეჟიმში მონაცემების გადასაცემად. |
| 12 | GND | — | ადგილზე |
| 13 | RSV | — | დაცულია |
| 14 | GND | — | ადგილზე |
| 15 | NC | — | არანაირი კავშირი შიგნით |
| 16 | NC | — | არანაირი კავშირი შიგნით |
| 17 | NC | — | არანაირი კავშირი შიგნით |
| 18 | NC | — | არანაირი კავშირი შიგნით |
| 19 | PVT_STAT | O | PVT სტატუსი: აქტიური მაღალი; გამოდის მაღალი პოზიციონირებისას და დაბალი, როდესაც არ არის პოზიციონირებული |
| 20 | RTK_STAT | O | RTK სტატუსი: აქტიური მაღალი; გამომავალი მაღალია RTK ფიქსირებული გადაწყვეტისთვის და დაბალი სხვა პოზიციონირების სტატუსისთვის ან პოზიციონირების გარეშე |
| 21 | ERR_STAT | O | შეცდომის სტატუსი: აქტიური მაღალი; გამომავალი მაღალია თვითტესტის წარუმატებლობისას და დაბალია თვითტესტის ჩაბარებისას |
| 22 | RSV | — | დაჯავშნილი, რეკომენდებულია მცურავი |
| 23 | RSV | — | დაჯავშნილი, რეკომენდებულია მცურავი |
| 24 | NC | — | არანაირი კავშირი შიგნით |
| 25 | NC | — | არანაირი კავშირი შიგნით |
| 26 | RXD2 | I | COM2 შეყვანა, LVTTL დონე |
| 27 | TXD2 | O | COM2 გამომავალი, LVTTL დონე |
| 28 | BIF | — | ჩამონტაჟებული ფუნქცია; რეკომენდირებულია ნახვრეტის ტესტირების წერტილის და 10 kΩ აწევის დამატება რეზისტორი; ვერ აკავშირებს მიწას ან ელექტრომომარაგებას და არ შეუძლია მონაცემების შეყვანა/გამოტანა, მაგრამ შეიძლება იყოს მცურავი |
| 29 | BIF | — | ჩამონტაჟებული ფუნქცია; რეკომენდირებულია ნახვრეტის გამჭოლი წერტილის და 10 kΩ ამომყვანი რეზისტორის დამატება; ვერ აკავშირებს მიწას ან ელექტრომომარაგებას და არ შეუძლია მონაცემების შეყვანა/გამოტანა, მაგრამ შეიძლება იყოს მცურავი |
| 30 | TXD3 | O | COM3 გამომავალი, რომელიც შეიძლება გამოყენებულ იქნას როგორც CAN TXD, LVTTL დონე |
| 31 | RXD3 | I | COM3 შეყვანა, რომელიც შეიძლება გამოყენებულ იქნას როგორც CAN RXD, LVTTL დონე |
| 32 | GND | — | ადგილზე |
| 33 | VCC | I | ელექტრომომარაგება |
| 34 | VCC | I | ელექტრომომარაგება |
| 35 | RSV | — | დაცულია |
| 36 | V_BCKP | I | როდესაც მთავარი კვების წყარო VCC გამორთულია, V_BCKP აწვდის ელექტროენერგიას RTC-ს და შესაბამის რეესტრს. დონის მოთხოვნა: 2.0 V ~ 3.6 V და სამუშაო დენი უნდა იყოს 60 μA-ზე ნაკლები 25 °C-ზე. თუ არ იყენებთ ცხელი დაწყების ფუნქციას, დააკავშირეთ V_BCKP VCC-ს. არ დააკავშიროთ იგი მიწასთან და არ დატოვოთ მცურავი. |
| 37 | GND | — | ადგილზე |
| 38 | NC | — | არანაირი კავშირი შიგნით |
| 39 | NC | — | არანაირი კავშირი შიგნით |
| 40 | NC | — | არანაირი კავშირი შიგნით |
| 41 | GND | — | ადგილზე |
| 42 | TXD1 | O | COM1 გამომავალი, LVTTL დონე |
| 43 | RXD1 | I | COM1 შეყვანა, LVTTL დონე |
| 44 | SDA | I/O | I2 C მონაცემები |
| 45 | SCL | I/O | I2C საათი |
| 46 | NC | — | არანაირი კავშირი შიგნით |
| 47 | NC | — | არანაირი კავშირი შიგნით |
| 48 | GND | — | ადგილზე |
| 49 | RESET_N | I | სისტემის გადატვირთვა; აქტიური დაბალი. აქტიური დრო უნდა იყოს არანაკლებ 5 ms. |
| 50 | NC | — | არანაირი კავშირი შიგნით |
| 51 | EVENT | I | მოვლენის ნიშნის შეყვანა, რეგულირებადი სიხშირით და პოლარობა |
| 52 | NC | — | არანაირი კავშირი შიგნით |
| 53 | PPS | O | პულსი წამში, რეგულირებადი პულსის სიგანით და პოლარობით |
| 54 | NC | — | არანაირი კავშირი შიგნით |
2.2 ელექტრული სპეციფიკაციები
2.2.1 აბსოლუტური მაქსიმალური რეიტინგები
ცხრილი 2-2 აბსოლუტური მაქსიმალური რეიტინგები
| პარამეტრი | სიმბოლო | მინ. | მაქს. | ერთეული |
| ელექტრომომარაგება ტtage | VCC | -0.3 | 3.6 | V |
| შეყვანის მოცულობაtage | ვინ | -0.3 | 3.6 | V |
| GNSS ანტენის სიგნალის შეყვანა | ANT_IN | -0.3 | 6 | V |
| ანტენის RF შეყვანის სიმძლავრე | ANT_IN შეყვანის სიმძლავრე | 10 | დბმ | |
| გარე LNA კვების წყარო | VCC_RF | -0.3 | 3.6 | V |
| VCC_RF გამომავალი დენი | ICC_RF | 100 | mA | |
| შენახვის ტემპერატურა | Tstg | -55 | 95 | ° C |
2.2.2 საოპერაციო პირობები
ცხრილი 2-3 საოპერაციო პირობები
| პარამეტრი | სიმბოლო | მინ. | ტიპი. | მაქს. | ერთეული | მდგომარეობა |
| ელექტრომომარაგება ტtage7 | VCC | 3 | 3.3 | 3.6 | V | |
| მაქსიმალური VCC Ripple | Vrpp | 0 | 50 | mV | ||
| სამუშაო დენი 8 | იოპრ | 145 | 180 | mA | VCC=3.3 ვ |
6 არ არის რეკომენდებული VCC_RF-ის მიღება ANT_BIAS-ად ანტენის შესანახად. იხილეთ სექცია 3.2 მეტი
7 ტომიtagVCC-ის დიაპაზონი (3.0 V ~ 3.6 V) უკვე მოიცავდა ტალღის ტომსtage.
8 ვინაიდან პროდუქტს აქვს კონდენსატორები შიგნით, შემომავალი დენი ჩნდება ჩართვის დროს. თქვენ უნდა შეაფასოთ რეალურ გარემოში, რათა შეამოწმოთ მიწოდების ტომის ეფექტიtage ვარდნა გამოწვეული შეტევით
| პარამეტრი | სიმბოლო | მინ. | ტიპი. | მაქს. | ერთეული C |
| VCC_RF გამომავალი ტომიtage | VCC_RF | VCC-0.1 | V | ||
| VCC_RF გამომავალი დენი | ICC_RF | 50 | mA | ||
| ოპერაციული ტემპერატურა | ტოპრ | -40 | 85 | ° C | |
| ენერგიის მოხმარება | P | 480 | mW |
2.2.3 IO ბარიერი
ცხრილი 2-4 IO ბარიერი
| პარამეტრი | სიმბოლო | მინ. | ტიპი. | მაქს. | ერთეული C | მდგომარეობა |
| დაბალი დონე შეყვანის მოცულობაtage |
ვინ_დაბალი | 0 | 0.6 | V | ||
| მაღალი დონე შეყვანის მოცულობაtage |
ვინ_მაღალი | VCC × 0.7 | VCC + 0.2 | V | ||
| დაბალი დონე გამოყვანის ტომიtage |
Vout_low | 0 | 0.45 | V | Iout = 2 mA | |
| მაღალი დონე გამოყვანის ტომიtage |
Vout_high | VCC - 0.45 |
VCC | V | Iout = 2 mA |
2.2.4 ანტენის ფუნქცია
ცხრილი 2-5 ანტენის ფუნქცია
| პარამეტრი | სიმბოლო | მინ. | ტიპი. | მაქს. | ერთეული C | მდგომარეობა |
| ოპტიმალური შეყვანის მოგება | განთი | 18 | 30 | 36 | dB |
2.3 ზომები
ცხრილი 2-6 ზომები
|
პარამეტრი |
მინ. (მმ) | ტიპი. (მმ) |
მაქს. (მმ) |
| A | 21.80 | 22.00 | 22.50 |
| B | 16.80 | 17.00 | 17.50 |
| C | 2.40 | 2.60 | 2.80 |
| D | 3.75 | 3.85 | 3.95 |
| E | 0.95 | 1.05 | 1.15 |
| F | 1.80 | 1.90 | 2.00 |
| G | 1.00 | 1.10 | 1.20 |
| H | 0.70 | 0.80 | 0.90 |
| K | 1.40 | 1.50 | 1.60 |
| M | 3.55 | 3.65 | 3.75 |
| N | 3.15 | 3.25 | 3.35 |
| P | 2.00 | 2.10 | 2.20 |
| R | 1.00 | 1.10 | 1.20 |
| X | 0.72 | 0.82 | 0.92 |

ტექნიკის დიზაინი
3.1 რეკომენდებული მინიმალური დიზაინი L1: რეკომენდებულია 68 nH RF ინდუქტორი 0603 პაკეტში
L1: რეკომენდებულია 68 nH RF ინდუქტორი 0603 პაკეტში
C1: რეკომენდებულია 100 nF + 100 pF კონდენსატორები, რომლებიც დაკავშირებულია პარალელურად
C2: რეკომენდებულია 100 pF კონდენსატორი
C3: რეკომენდებულია N * 10 μF + 1 * 100 nF კონდენსატორები, რომლებიც დაკავშირებულია პარალელურად, ხოლო მთლიანი ინდუქცია უნდა იყოს არანაკლებ 30 μF
R1: რეკომენდებულია 10 kΩ რეზისტორი
3.2 ანტენის კვების დიზაინი
UM980 უბრალოდ მხარს უჭერს ანტენის კვებას მოდულის გარედან და არა შიგნიდან. რეკომენდირებულია მაღალი სიმძლავრის მქონე მოწყობილობების გამოყენება და რომლებიც უძლებენ მაღალ მოცულობასtagე. გაზის გამონადენი მილი, ვარისტორი, TVS მილი და სხვა მაღალი სიმძლავრის დამცავი მოწყობილობები ასევე შეიძლება გამოყენებულ იქნას ელექტრომომარაგების წრეში, რათა შემდგომ დაიცვან მოდული ელვისებური დარტყმისა და ტალღისგან.
![]() თუ ანტენის მიწოდების წყარო ANT_BIAS და მოდულის მთავარი მიწოდება VCC იყენებენ ერთსა და იმავე დენის ლიანდაგს, ESD-ს, ტალღას და გადატვირთვასtage ანტენიდან ექნება გავლენა VCC-ზე, რამაც შეიძლება გამოიწვიოს მოდულის დაზიანება. ამიტომ, რეკომენდირებულია ANT_BIAS-ისთვის დამოუკიდებელი დენის ლიანდაგის დაპროექტება, რათა შემცირდეს მოდულის დაზიანების შესაძლებლობა.
თუ ანტენის მიწოდების წყარო ANT_BIAS და მოდულის მთავარი მიწოდება VCC იყენებენ ერთსა და იმავე დენის ლიანდაგს, ESD-ს, ტალღას და გადატვირთვასtage ანტენიდან ექნება გავლენა VCC-ზე, რამაც შეიძლება გამოიწვიოს მოდულის დაზიანება. ამიტომ, რეკომენდირებულია ANT_BIAS-ისთვის დამოუკიდებელი დენის ლიანდაგის დაპროექტება, რათა შემცირდეს მოდულის დაზიანების შესაძლებლობა. 
შენიშვნები:
- L1: რეკომენდებულია კვების ინდუქტორი, 68 nH RF ინდუქტორი 0603 პაკეტში
- C1: გამორთვის კონდენსატორი, რეკომენდებულია 100 nF/100 pF ორი კონდენსატორის პარალელურად დაკავშირება
- C2: DC ბლოკირების კონდენსატორი, რეკომენდებული 100 pF კონდენსატორი
- არ არის რეკომენდებული VCC_RF-ის მიღება ANT_BIAS-ად ანტენის შესანახად (VCC_RF არ არის ოპტიმიზირებული ელვისებური დარტყმის, ტალღის საწინააღმდეგოდ და დენის გადაჭარბებული დაცვისთვის მოდულის კომპაქტური ზომის გამო)
- D1: ESD დიოდი, აირჩიეთ ESD დამცავი მოწყობილობა, რომელიც მხარს უჭერს მაღალი სიხშირის სიგნალებს (2000 MHz ზემოთ)
- D2: TVS დიოდი, აირჩიეთ TVS დიოდი შესაბამისი clampდაზუსტება საკვების მოთხოვნის შესაბამისადtage და ანტენა უძლებს ტtage
3.3 ჩართვა და გამორთვა
VCC
- VCC საწყისი დონე ჩართვისას უნდა იყოს 0.4 ვ-ზე ნაკლები.
- VCC რamp როდესაც ჩართვა უნდა იყოს მონოტონური, პლატოების გარეშე.
- ტომიtagდარტყმისა და ზარის მნიშვნელობები უნდა იყოს VCC 5%-ის ფარგლებში.
- VCC ჩართვის ტალღის ფორმა: დროის ინტერვალი 10%-დან 90%-მდე უნდა იყოს 100 μs ~ 1 ms ფარგლებში.
- ჩართვის დროის ინტერვალი: დროის ინტერვალი გამორთვას შორის (VCC < 0.4 V) შემდეგ ჩართვამდე უნდა იყოს 500 ms-ზე მეტი.
V_BCKP
- V_BCKP საწყისი დონე ჩართვისას უნდა იყოს 0.4 ვ-ზე ნაკლები.
- V_BCKP რamp როდესაც ჩართვა უნდა იყოს მონოტონური, პლატოების გარეშე.
- ტომიtagდარტყმისა და ზარის მნიშვნელობები უნდა იყოს V_BCKP 5%-ის ფარგლებში.
- V_BCKP ჩართვის ტალღის ფორმა: დროის ინტერვალი 10%-დან 90%-მდე უნდა იყოს 100 μs ~ 1 ms ფარგლებში.
- ჩართვის დროის ინტერვალი: დროის ინტერვალი გამორთვას შორის (V_BCKP < 0.4 V) შემდეგ ჩართვამდე უნდა იყოს 500 ms-ზე მეტი.
3.4 დამიწება და სითბოს გაფრქვევა  48 ბალიშები მართკუთხედში 3-3-ზე არის დამიწების და სითბოს გაფრქვევისთვის. PCB დიზაინში, ბალიშები უნდა იყოს დაკავშირებული დიდი ზომის მიწასთან, რათა გააძლიეროს სითბოს გაფრქვევა.
48 ბალიშები მართკუთხედში 3-3-ზე არის დამიწების და სითბოს გაფრქვევისთვის. PCB დიზაინში, ბალიშები უნდა იყოს დაკავშირებული დიდი ზომის მიწასთან, რათა გააძლიეროს სითბოს გაფრქვევა.
3.5 რეკომენდებული PCB პაკეტის დიზაინი
იხილეთ შემდეგი სურათი PCB პაკეტის რეკომენდებული დიზაინისთვის.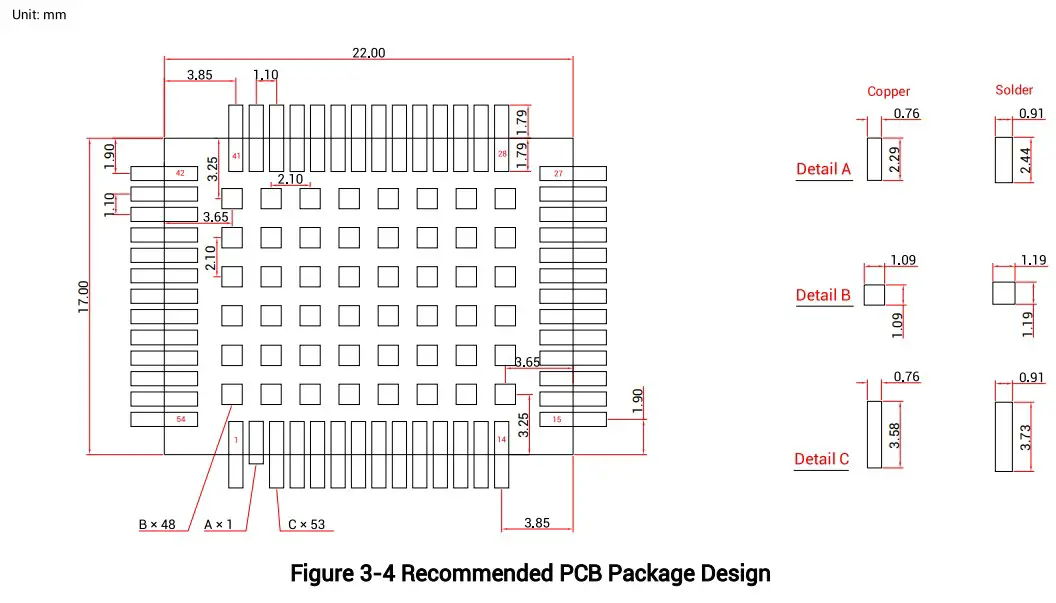 შენიშვნები:
შენიშვნები:
ტესტირების მოხერხებულობისთვის, ქინძისთავების შედუღების ბალიშები გრძელია, რაც ბევრად აღემატება მოდულის საზღვარს. მაგampლე:
- ბალიშები, რომლებიც მითითებულია როგორც დეტალი C, 1.79 მმ-ით გრძელია, ვიდრე მოდულის საზღვარი.
- საფენი, რომელიც მითითებულია როგორც დეტალი A, 0.50 მმ-ით გრძელია, ვიდრე მოდულის საზღვარი. ის შედარებით მოკლეა, რადგან ეს არის RF pin pad, ამიტომ ვიმედოვნებთ, რომ ზედაპირზე კვალი რაც შეიძლება მოკლეა, რათა შეამციროს გარე ჩარევის გავლენა RF სიგნალებზე.
წარმოების მოთხოვნა
რეკომენდირებული შედუღების ტემპერატურის მრუდი შემდეგია:  ტემპერატურის მატება სtage
ტემპერატურის მატება სtage
- აღმავალი ფერდობი: მაქს. 3 ° C/s
- მზარდი ტემპერატურის დიაპაზონი: 50 °C ~ 150 °C
წინასწარ გათბობა სtage
- წინასწარ გახურების დრო: 60-120 წმ
- წინასწარ გათბობის ტემპერატურის დიაპაზონი: 150 °C ~ 180 °C
რეფლუქსი სtage
- დნობის ტემპერატურაზე (217 °C) დრო: 40 ~ 60 წმ
- პიკური ტემპერატურა შედუღებისთვის: არაუმეტეს 245 °C
![]() გაგრილება სtage
გაგრილება სtage
- გაგრილების ფერდობზე: მაქს. 4 °C/წმ
- მოდულის შედუღების დროს ჩამოვარდნის თავიდან ასაცილებლად, დიზაინის დროს არ დააწებოთ ის დაფის უკანა მხარეს და არ არის რეკომენდებული შედუღების ციკლის ორჯერ გავლა.
- შედუღების ტემპერატურის დაყენება დამოკიდებულია ქარხნის ბევრ ფაქტორზე, როგორიცაა დაფის ტიპი, შედუღების პასტის ტიპი, შედუღების პასტის სისქე და ა.შ.
- ვინაიდან ტყვიის შედუღების ტემპერატურა შედარებით დაბალია, ამ მეთოდის გამოყენების შემთხვევაში, გთხოვთ, უპირატესობა მიანიჭოთ დაფაზე არსებულ სხვა კომპონენტებს.
- შაბლონის გახსნა უნდა აკმაყოფილებდეს თქვენი დიზაინის მოთხოვნებს და შეესაბამებოდეს შემოწმების სტანდარტებს. შაბლონის სისქე რეკომენდირებულია იყოს 0.15მმ.
შეფუთვა
5.1 ეტიკეტის აღწერა  5.2 პროდუქტის შეფუთვა
5.2 პროდუქტის შეფუთვა
UM980 მოდული იყენებს გადამზიდავ ლენტს და ბორბალს (შესაფერისი ზედაპირული სამონტაჟო მოწყობილობებისთვის), შეფუთულია ვაკუუმ-დალუქული ალუმინის ფოლგის ანტისტატიკური ჩანთებით, შიგნით გამშრალებით, ტენიანობის თავიდან ასაცილებლად. როდესაც იყენებთ ხელახალი შედუღების პროცესის შედუღების მოდულებს, იჯარით მკაცრად დაიცვან IPC სტანდარტი მოდულებზე ტემპერატურისა და ტენიანობის კონტროლის ჩასატარებლად. ვინაიდან შესაფუთი მასალები, როგორიცაა გადამზიდი ლენტი, უძლებს მხოლოდ 55 გრადუს ცელსიუს ტემპერატურას, მოდულები უნდა ამოღებულ იქნას შეფუთვიდან გამოცხობისას. 
 შენიშვნა:
შენიშვნა:
- 10 გვერდითი ხვრელის კუმულაციური ტოლერანტობა არ უნდა აღემატებოდეს ± 0.2 მმ.
- ფირის მასალა: შავი ანტისტატიკური PS (ზედაპირის წინაღობა 10 5 -10 11) (ზედაპირის სტატიკური მოცულობაtage <100 V), სისქე: 0.35 მმ.
- 13 დიუმიანი რგოლის პაკეტის მთლიანი სიგრძე: 6.816 მ (ცარიელი პაკეტების პირველი ნაწილის სიგრძე: 0.408 მ, მოდულების შემცველი პაკეტების სიგრძე: 6 მ, ცარიელი პაკეტების ბოლო ნაწილის სიგრძე: 0.408 მ).
- პაკეტების საერთო რაოდენობა 13 დიუმიან რგოლში პაკეტში: 284 (ცარიელი პაკეტების პირველი ნაწილის რაოდენობა: 17; მოდულების რეალური რაოდენობა პაკეტებში: 250; ცარიელი პაკეტების ბოლო ნაწილის რაოდენობა: 17).
- ყველა განზომილების დიზაინი შეესაბამება EIA-481-C-2003.
- 250 მმ სიგრძის გადამზიდი ფირის მაქსიმალური დახრის ხარისხი არ უნდა აღემატებოდეს 1 მმ-ს (იხ. სურათი ქვემოთ).
 ცხრილი 5-1 პაკეტის აღწერა
ცხრილი 5-1 პაკეტის აღწერა
| ელემენტი | აღწერა |
| მოდულის ნომერი | 250 ცალი / რგოლი |
| ბორბლის ზომა | უჯრა: 13″ გარე დიამეტრი: 330 ± 2 მმ, შიდა დიამეტრი: 180 ± 2 მმ, სიგანე: 44.5 ± 0.5 მმ სისქე: 2.0 ± 0.2 მმ |
| გადამზიდავი ლენტი | შორის მანძილი (ცენტრიდან ცენტრამდე მანძილი): 24 მმ |
ზედაპირზე დამონტაჟებამდე დარწმუნდით, რომ ტენიანობის ინდიკატორზე 30%-იანი წრის ფერი ლურჯია (იხ. სურათი 5-4). თუ 20%-იანი წრის ფერი ვარდისფერია, ხოლო 30%-იანი წრის ფერი ლავანდისფერია (იხ. სურათი 5-5), თქვენ უნდა გამოაცხვოთ მოდული მანამ, სანამ არ გახდება ლურჯი. UM980 შეფასებულია MSL მე-3 დონეზე. გთხოვთ, მიმართოთ IPC/JEDEC J-STD-033 სტანდარტებს პაკეტისა და ექსპლუატაციის მოთხოვნებისთვის. თქვენ ასევე შეგიძლიათ წვდომა webსაიტი www.jedec.org მეტი ინფორმაციის მისაღებად. ვაკუუმში დალუქულ ალუმინის ფოლგის ანტისტატიკური ჩანთებში შეფუთული UM980 მოდულის შენახვის ვადა ერთი წელია.
ვაკუუმში დალუქულ ალუმინის ფოლგის ანტისტატიკური ჩანთებში შეფუთული UM980 მოდულის შენახვის ვადა ერთი წელია.
![]() Unicore Communications, Inc.
Unicore Communications, Inc.
F3, No.7, Fengxian East Road, Haidian, Pekin, PRChina,
100094
www.unicorecomm.com
ტელეფონი: 86-10-69939800
ფაქსი: 86-10-69939888
info@unicorecomm.com
www.unicorecomm.com
დოკუმენტები / რესურსები
 |
unicore UM980 All Constellation მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების მოდული [pdf] ინსტრუქციის სახელმძღვანელო UM980 ყველა თანავარსკვლავედის მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების მოდული, UM980, ყველა თანავარსკვლავედის მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების მოდული, თანავარსკვლავედის მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების მოდული, მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების მოდული, მრავალ სიხშირის მაღალი სიზუსტის RTK პოზიციონირების sion RTK პოზიციონირების მოდული, ზუსტი RTK პოზიციონირების მოდული, RTK პოზიციონირების მოდული, პოზიციონირების მოდული |